Σημείωση: Άτυπη συναντηση την 3η-4η ώρα με την 1η και 3η ομάδα: Τετάρτη 6 Απριλίου
- Διερεύνση και επιλογή ιδέας για συμμετοχή στο Φεστιβάλ Ρομποτικής του ΑΠΘ / Τμήμα Φυσικής.
- Χρήση αισθητήρα απόστασης στο tinkercad (4η ομάδα)
- Χρήση βηματικού κινητήρα (1η ομάδα)
Χρησιμοποιήθηκε:
-
- ο κλασσικός βηματικός κινητήρας 28BYJ-48
- ULN2003 motor driver
- Προσθέσαμε το extension > stepper-motor
- Για να λειτουργήσει o βηματικός κινητήρας χρειάζεται εξωτερική τροφοδοσία 5V (δεν επαρκούν τα 3.3V του microbit και επιπλέον μπορεί να του προκαλέσει ζημιά η τροφοδοσία του κινητήρα από τα 3.3V, GRD του microbit)
- Λειτούργησε χρησιμοποιώντας ως εξόδους τα pins: 0, 1 ,2, 8
- ΔΕΝ λειτούργησε με τα pins 0, 1 ,2, 3 και 0, 1 ,2, 6
- Επιπλέον πληροφορίες:
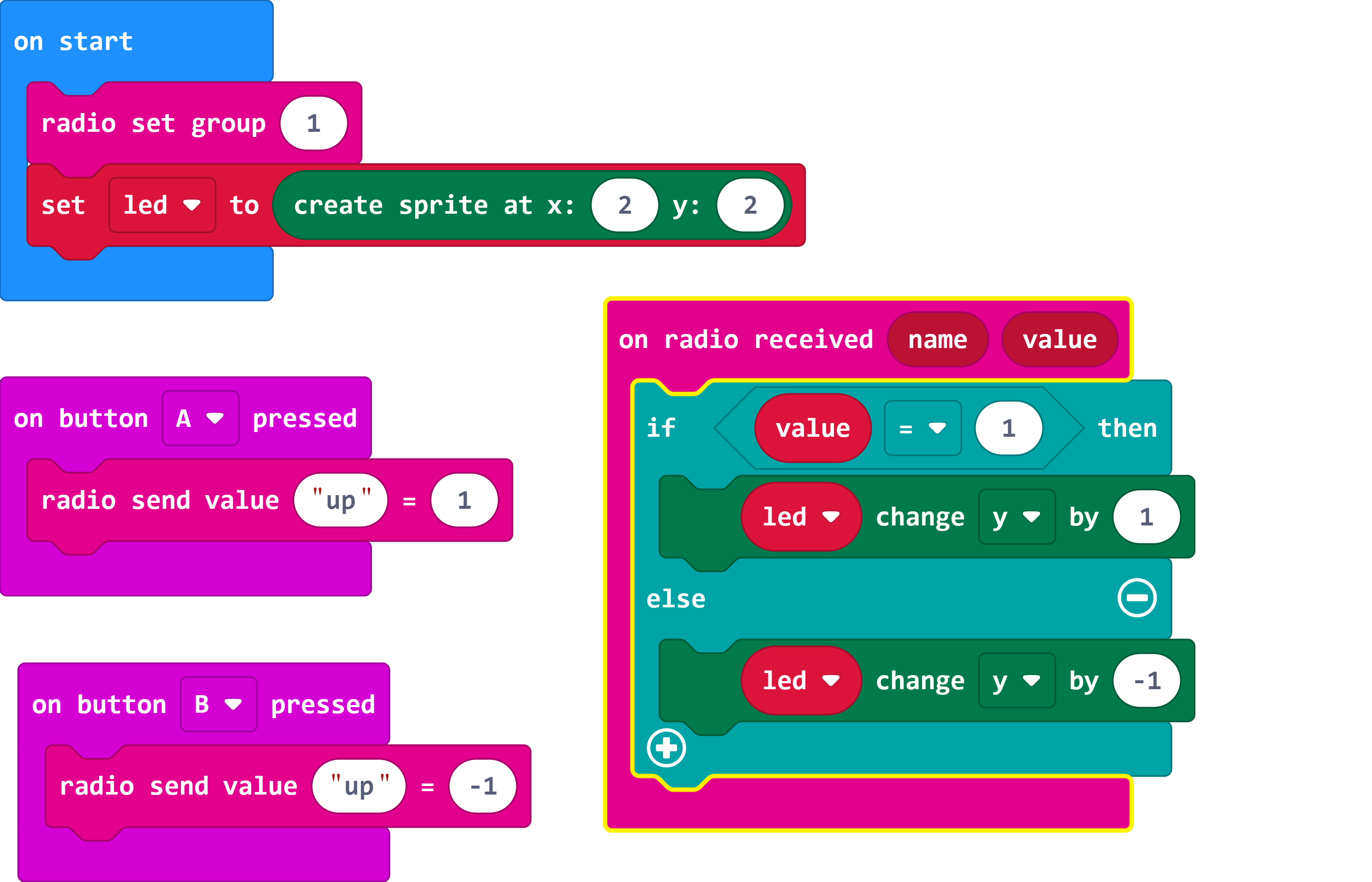
- Διερεύνηση ραδιο-σύνδεσης 2 microbit (3η ομάδα) ώστε το ένα να λειτουργεί ως τηλεχειριστήριο. Το παρακάτω εισαγωγικό βίντεο έχει μια εξαιρετική εισαγωγή στον ηλεκτρομαγνητισμό (ακόμη και για μαθητές Γ’ Λυκείου) και δείχνει και τον απλό προγραμματισμό ραδιοσύνδεσης 2 ή περισσότερων microbits!
Επιπλέον πληροφορίες:
- Επίσημες οδηγίες από την ιστοσελίδα του microbit : https://makecode.microbit.org/ και επιλογή το μάθημα: microchat
- https://www.hackster.io/anish78/communication-of-micro-bit-using-radio-signal-7b28ce
- Μία πρόταση υλοποίησης με την οποία μετακινούμε πάνω κάτω ένα led στην οθόνη του microbit χρησιμοποιώντας τα κουμπιά Α και Β ενός άλλου microbit. Κατεβάζουμε τον ίδιο παρακάτω κώδικα και στα 2 microbit.
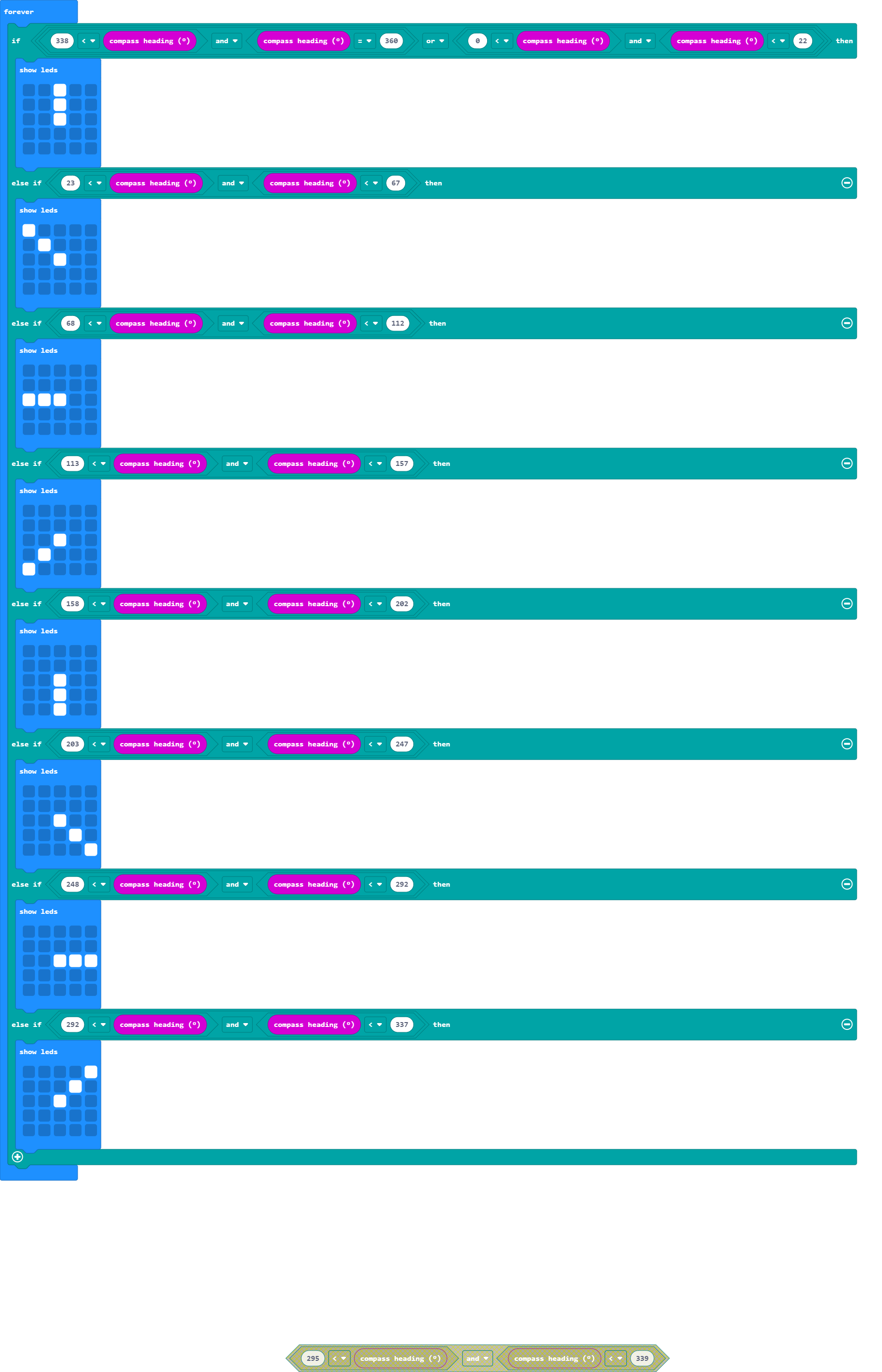
Πυξίδα
- Εξήγηση αναλογικού ψηφιακού
- Αναλογικό > Κβαντισμένο > ψηφιακό
- Η περίπτωση του microbit και PWM
PWM: όσο περισσότερο διαρκεί ο παλμός τόσο περισσότερη ενέργεια μεταφέρεται στην έξοδο!
- Χρήση σερβοκινητήρα από την 1η ομάδα
A/ Ενότητα: Παρουσίαση διαγωνισμών
6th Aegean Robotics Competition 2022: http://icsdweb.aegean.gr/aegeanrbtcs/?page_id=3207
– Παναγιώτα: Robo Mission
- ( παιδικό regular) https://www.youtube.com/watch?v=7h2aw72fgFA
- ( regular γυμνασιου ) https://www.youtube.com/watch?v=X36j8bSdq6w
– Μαριάννα: Robo Sports
– Μάριος: Future Innovators
– Θανάσης: Future Engineer
Β/ Ενότητα: Κατασκευή οχήματος
Εισαγωγή: στο σημερινό μάθημα θα κατασκευάσουμε ένα όχημα το οποίο θα ελέγχεται από ένα microbit.
Ερώτηση 1η: α)ένα κλασσικό όχημα τύπου “αυτοκινητάκι” με 4 ρόδες πόσους κινητήρες χρειάζεται για να μπορεί να προχωρήσει σε μια τεθλασμένη διαδρομή; Δηλαδή να συνδυάσει την ευθεία ματακίνηση αλλά να μπορεί και να στρίψει;
 β) θεωρείται ότι έχει δυσκολίες η κλασσική σχεδίαση οχήματος στην περίπτωση ενός ρομπότ και γιατί;
β) θεωρείται ότι έχει δυσκολίες η κλασσική σχεδίαση οχήματος στην περίπτωση ενός ρομπότ και γιατί;
Ερώτηση 2η: Τα περισσότερα ρομπότ δεν έχουν τον κλασσικό σχεδιασμό. Μπορείτε να βρείτε στο διαδίκτυο μερικές εναλλακτικές υλοποιήσεις και να σκεφτείτε τα πλεονεκτήματά τους;







Κατασκευή οχήματος:
Έχετε στη διάθεσή σας:
- χαρτόνια
- μακετόχαρτα,
- αυτοκόλλητες ταινίες διπλής όψης
- θερμόκολλες και πιστόλια θερμόκολλας
- ξυλάκια και ξύλινούς άξονες
- ψαλίδια και κοπίδια (προσοχή…!)
- δεματικά
Σημείωση: μας έλλειψαν χάρακες, μολύβια
Κινητήρες
Για την εισαγωγή στη χρήση κινητήρων στην ρομποτική θα παρουσιαστούν οι πληροφορίες της ιστοσελίδας: Εισαγωγή στους κινητήρες
DC Motors – Κινητήρες συνεχούς ρεύματος
1η Άσκηση
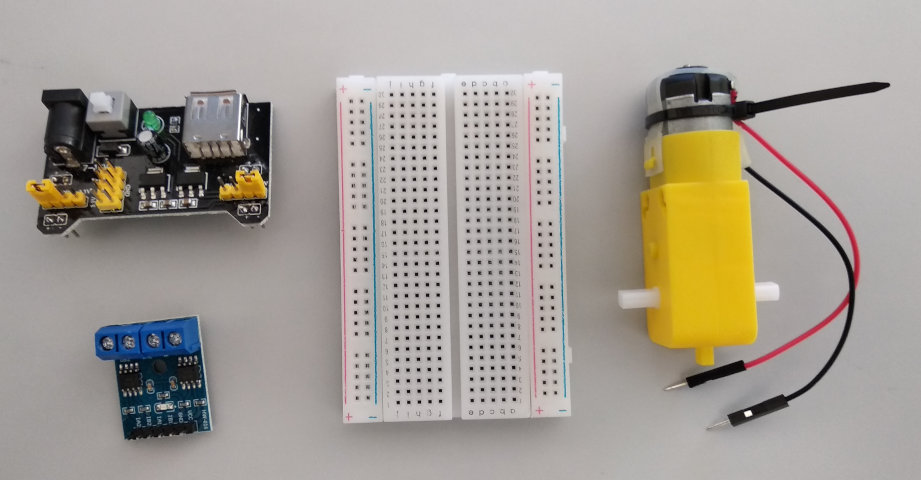
- Breadboard ή πλακέτα διασύνδεσης είναι η διάτρητη πλακέτα με τις οπές στις οποίες συνδέουμε καλώδια και εξαρτήματα. Ο τρόπος που είναι συνδεδεμένες (βραχυκυκλωμένες) οι οπές μεταξύ τους, φαίνεται στα παρακάτω σχήματα:
-
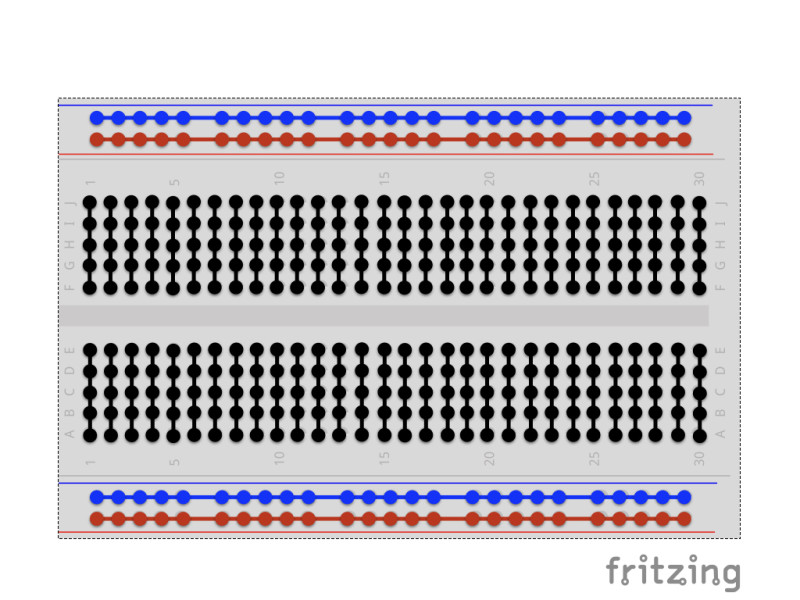
- Διάγραμμα συνδέσεων κάτω από τις οπές τις πλακέτας διασύνδεσης (breadboard). Στις μπλε-κόκκινες γραμμές συνήθως συνδέουμε τα καλώδια τροφοδοσίας
-
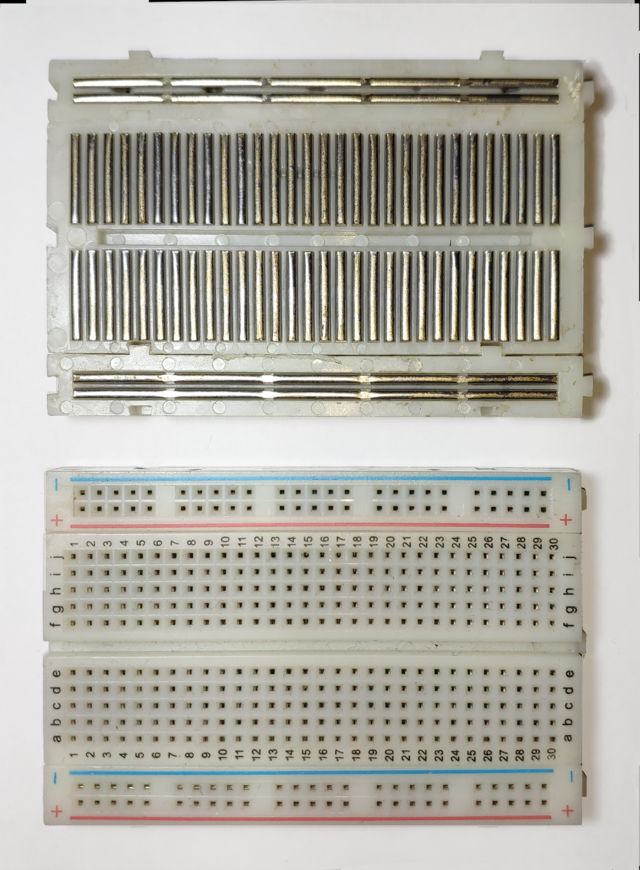
- Μια ανοιγμένη πλακέτα διασύνδεσης (breadboard). Η επάνω φωτογραφία είναι το κάτω μέρος στο οποίο βλέπετε που είναι ενωμένες (βραχυκυκλωμένες) οι οπές. Στο κάτω μέρος βλέπεται το επάνω μέρος στο οποίο “καρφώνουμε” τα καλώδια.
- Συνδέστε την μικρή πλακέτα τροφοδοσίας 5V-3.3V πάνω στο breadboard. Προσοχή να μην στραβώσετε τα pins.
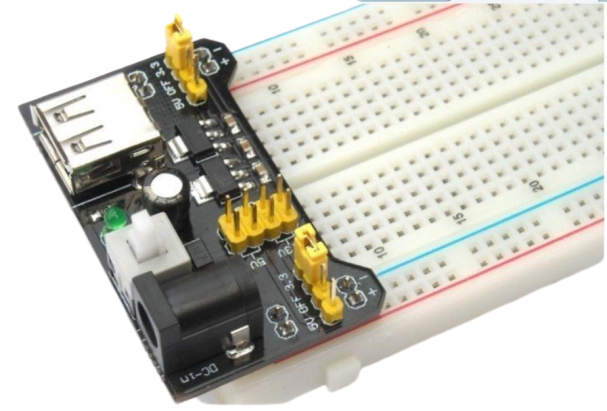
- Ελέγξτε τους κίτρινους βραχυκυκλωτήρες ώστε ο αριστερός να είναι στη θέση 5V (3) και ο δεξιός στη θέση 3,3V (4)
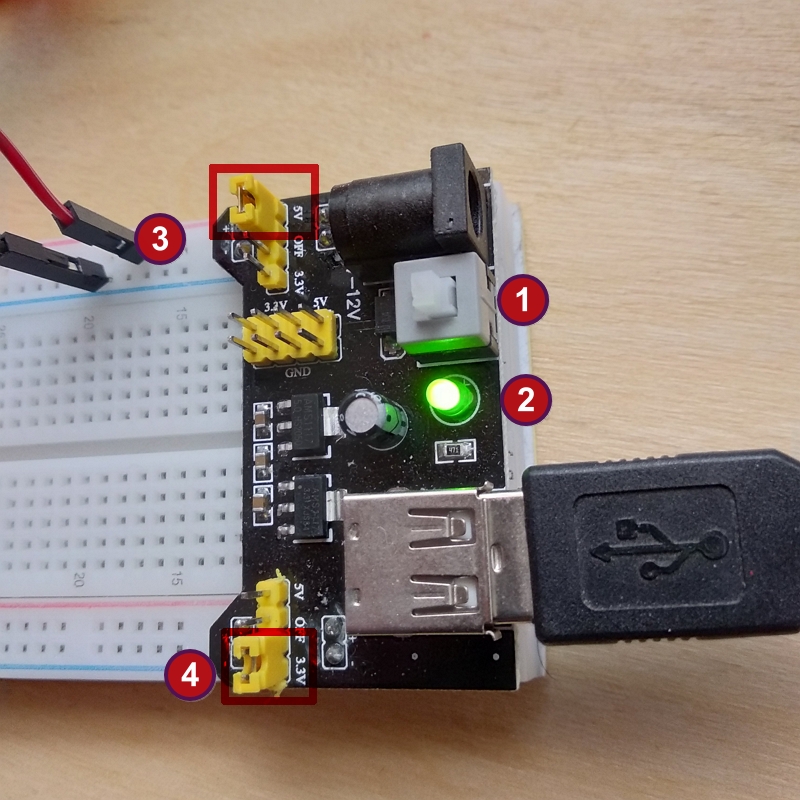 Συνδέστε το USB καλώδιο και πατήστε το άσπρο κουμπί (1) ώστε να ανάψει το πράσινο LED (2)
Συνδέστε το USB καλώδιο και πατήστε το άσπρο κουμπί (1) ώστε να ανάψει το πράσινο LED (2)
- Σε ποιες περιοχές του breadboard, έχουμε 3.3V και σε ποιες έχουμε 5V;
- Συνδέστε κατευθείαν, τον κίτρινο κινητήρα συνεχούς ρεύματος αρχικά στα 3.3 και μετά στα 5V. Τι παρατηρείτε;
- Συνδέστε τη μία ρόδα για να διακρίνετε καλύτερα την φορά περιστροφής. Πως μπορείτε να αλλάξετε την φορά περιστροφής;
- Είναι εύκολο;
- Μέσα στο εργαστηριακό κουτί έχετε διαφορετικές πλακέτες οδήγησης κινητήρων. Βρείτε στο διαδίκτυο πως μπορείτε να τις χρησιμοποιήσετε.
A. Χρήση της πλακέτας σύνδεσης κινητήρων L9110
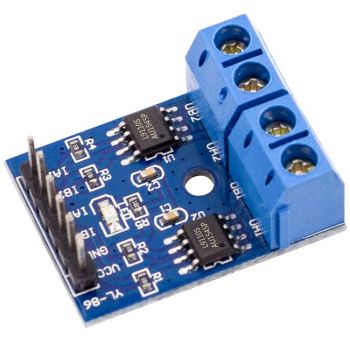
Πλακέτα οδήγησης κινητήρων L9110
Η μικρή πλακέτα L9110 μπορεί να ελέγξει:
- Δύο dc κινητήρες ή
- Έναν βηματικό κινητήρα 4 καλωδίων
Α/ Στις μπλε κλέμες στη δεξιά πλευρά συνδέουμε 1 ή 2 dc κινητήρες (σε άλλο μάθημα μπορούμε να συνδέσουμε 1 βηματικό κινητήρα).
Εδώ θα συνδέσουμε αρχικά τον 1ο (OA1, OB1 ) και μετά τον 2ο κίτρινο dc κινητήρα. To O στις κλέμες σημαίνει Output.
Β/ Στα pins αριστερά συνδέουμε την τροφοδοσία (VCC, GRD) και τα 4 καλώδια ελέγχου των 2 κινητήρων.
Εδώ θα συνδέσουμε:
i) από το breadboard τα 5V στο VCC, το (-) στη γείωση GRD
ii) από το microbit 2 καλώδια ελέγχου για τον 1ο κινητήρα στο (IA1, IB1) και 2 καλώδια ελέγχου για τον 2ο κινητήρα (IA2, IB2). Το I στα pins ελέγχου των κινητήρων σημαίνει Input.
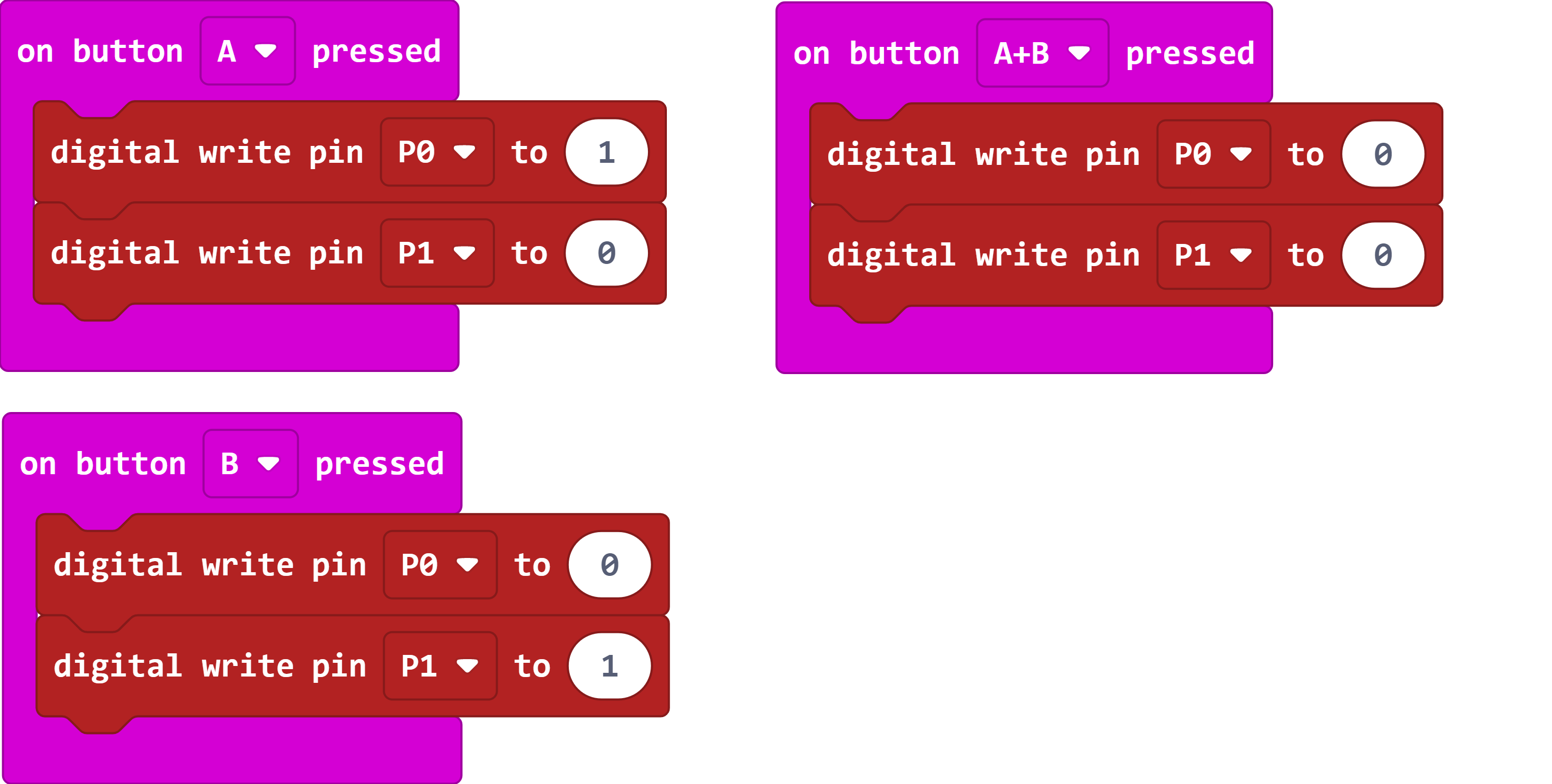
- Συνδέστε το microbit και προγραμματίστε το, όταν πατάτε το κουμπί Α να γυρνάει προς τη μία κατεύθυνση και με το Β να γυρνάει προς την άλλη κατεύθυνση. Κάντε κλικ στις παρακάτω εικόνες για να δείτε τις συνδέσεις:
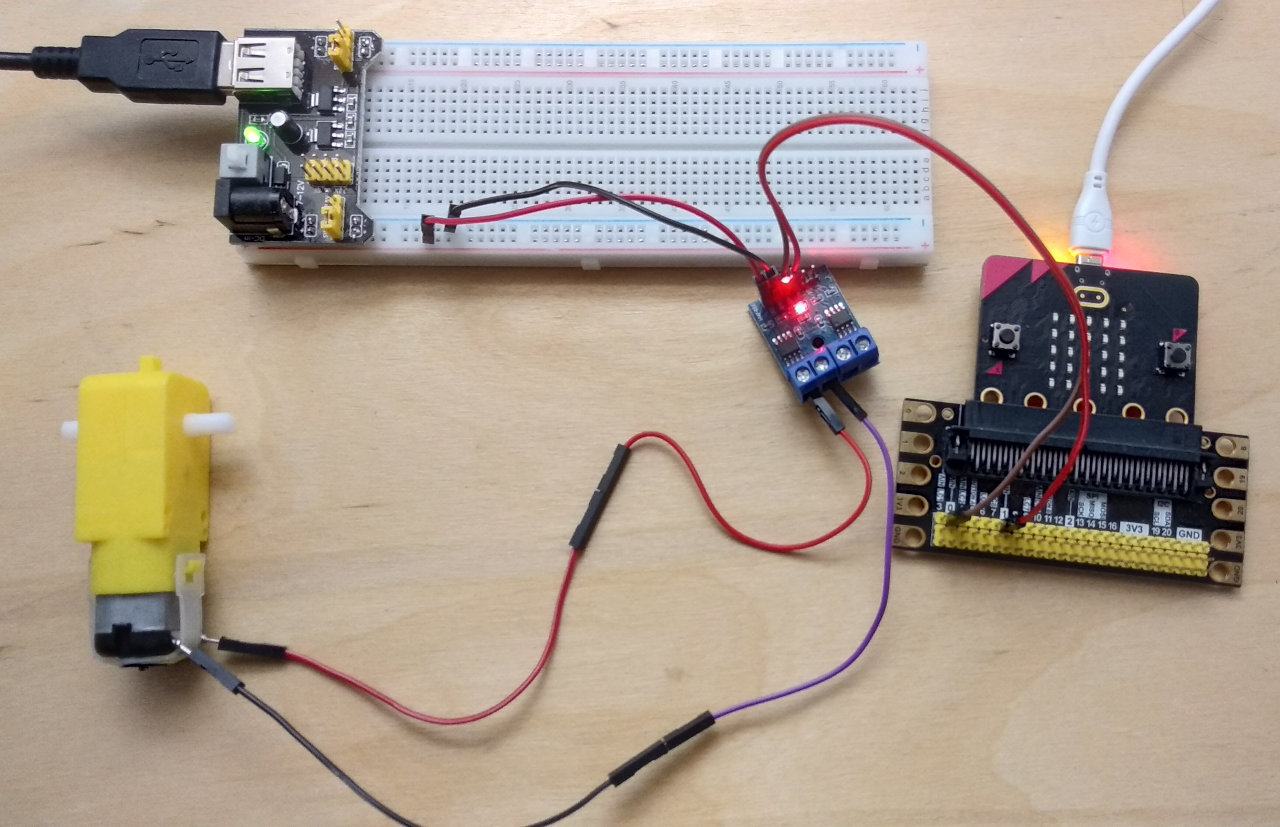
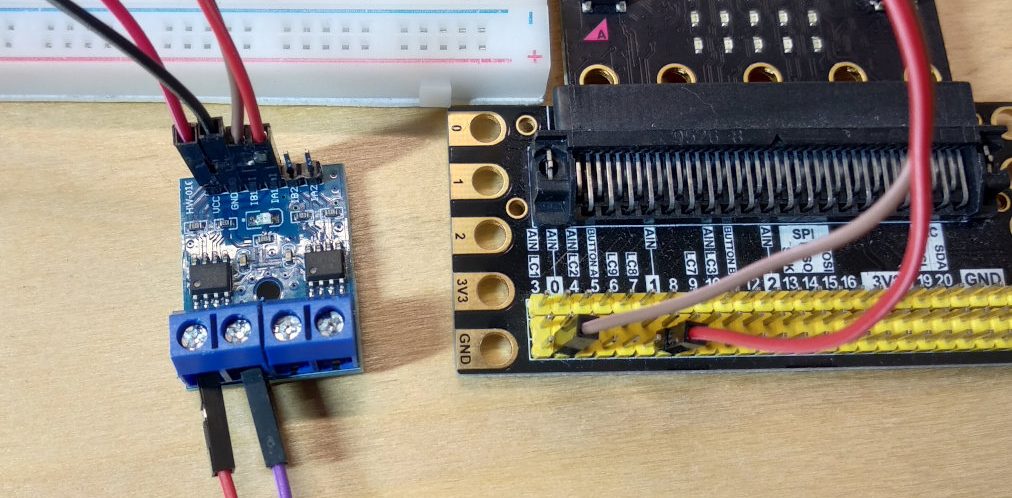
- Με παρόμοιο τρόπο συνδέστε και προγραμματίστε και τον 2ο κινητήρα.
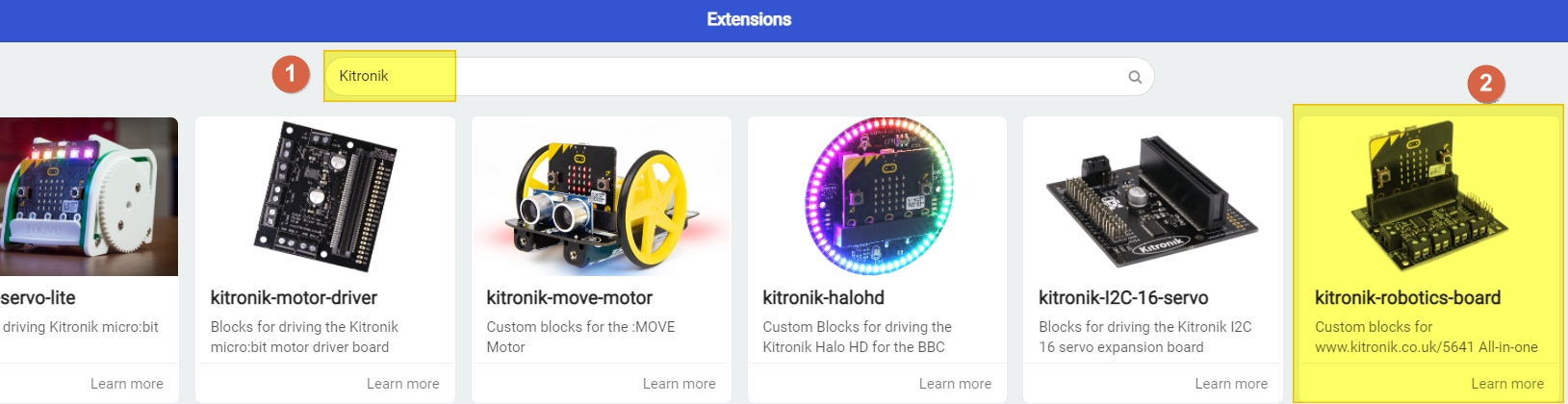
B. Χρήση της πλακέτας σύνδεσης κινητήρων Kitronik Compact Robotics Board 5693
Στο εργαστήριό μας, μερικές ομάδες έχουν την εξελιγμένη πλακέτα σύνδεσης κινητήρων Compact Robotics Board [5693] της εταιρίας Kitronik. Η πλακέτα έχει κόστος περίπου 15€, αλλά υπάρχουν πολλές άλλες παρόμοιες στην αγορά με παρόμοιες δυνατότητες και τιμή.
Η πλακέτα υποστηρίζει τον ταυτόχρονο έλεγχο:
- Τεσσάρων dc κινητήρων ή 2 βηματικών (των 4 καλωδίων) και
- Οκτώ σερβοκινητήρων
Για να συνδέσετε τον κίτρινο dc κινητήρα δείτε τη συνδεσμολογία στις παρακάτω εικόνες:
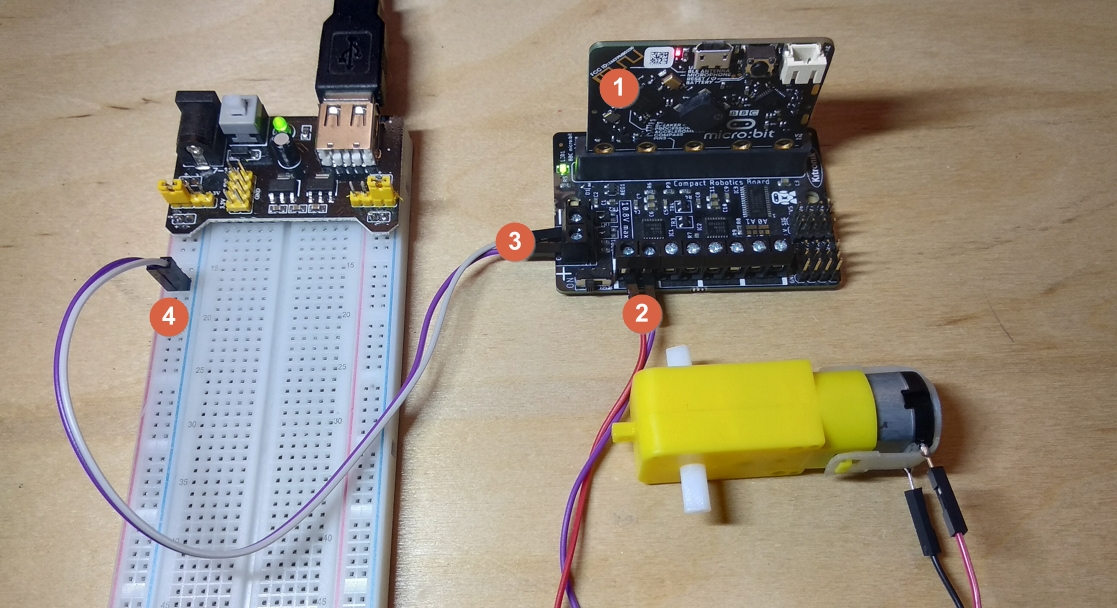
Στις παραπάνω εικόνες:
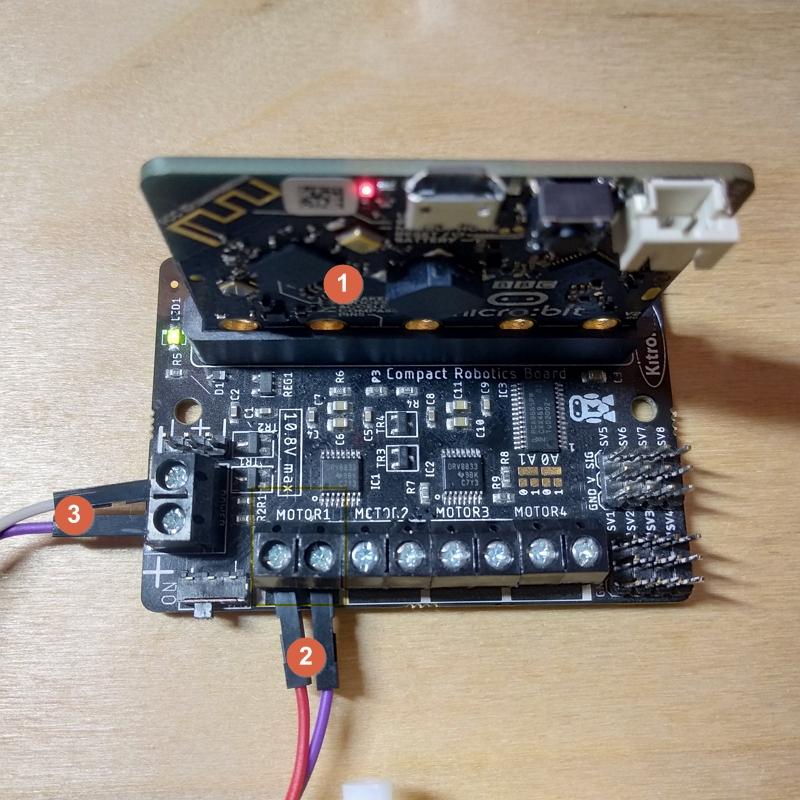
(1) Σύνδεση microbit. Προσοχή: Η όψη με τα LED είναι από την άλλη πλευρά!
(2) Σύνδεση του κινητήρα στις κλέμες MOTOR1. Θα χρειαστείτε κατσαβιδάκι.
(3) (4) Τροφοδοσία της πλακέτας με 5V από το usb τροφοδοτικό.
Στο περιβάλλον προγραμματισμού του microbit θα προσθέσουμε το Extension της συγκεκριμένη πλακέτας ώστε να έχουμε ειδικές εντολές για την αξιοποίησή της. Ακολουθήστε τα παρακάτω βήματα για να δημιουργήσετε το πρόγραμμα ελέγχου του κινητήρα:
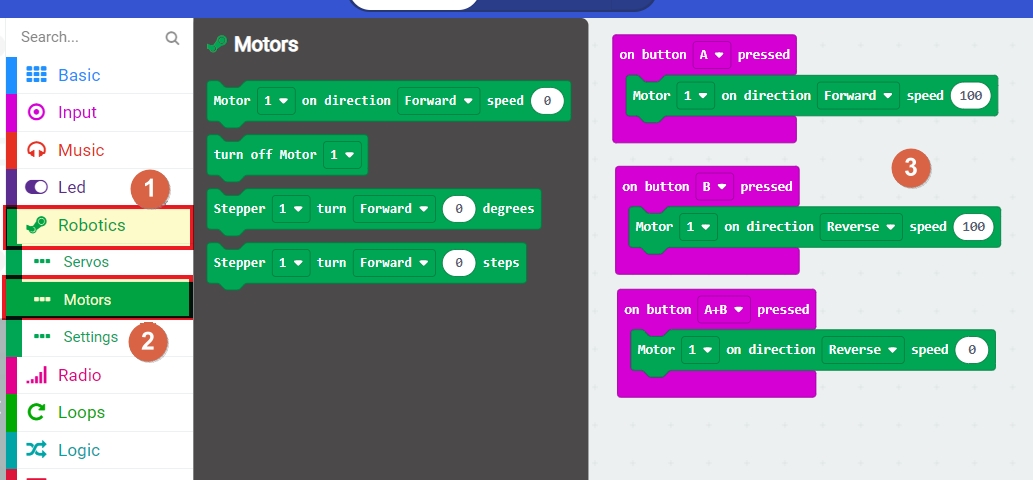
- Με παρόμοιο τρόπο συνδέστε και προγραμματίστε και τον 2ο κινητήρα.
Παρουσίαση της Ολυμπιάδας Ρομποτικής 2022
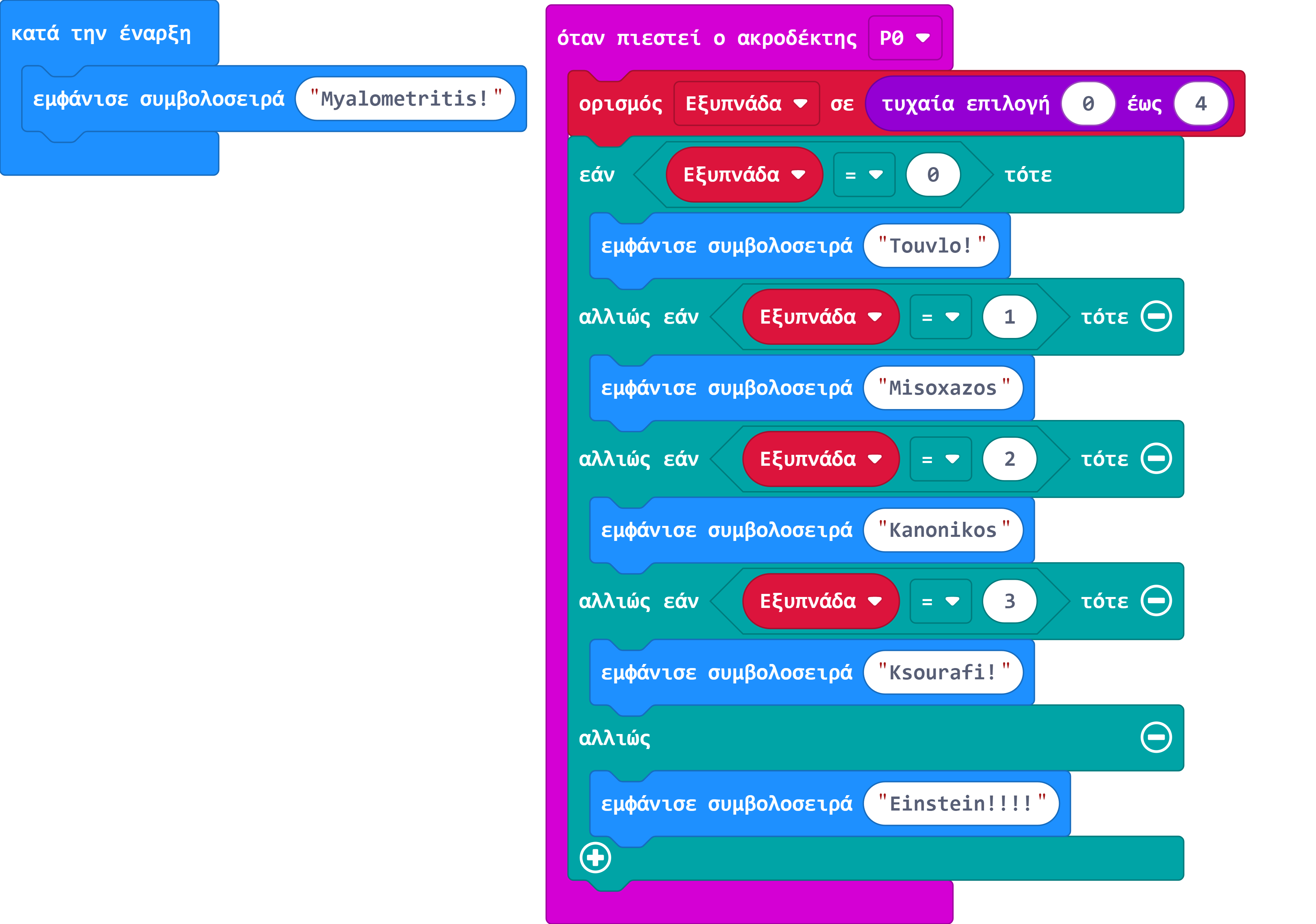
Άσκηση 1η: Μυαλομετρητής
 Μπορείτε να το τροποιήσετε ώστε να εμφανίζει τυχαία 5 χαρακτηρισμούς όπως:
Μπορείτε να το τροποιήσετε ώστε να εμφανίζει τυχαία 5 χαρακτηρισμούς όπως:
"Knoup!", "Ntax!", "Aitos", "Ksourafi", "Einstein"
Προσέξτε ότι στην οθόνη μπορούμε να εμφανίσουμε μόνο Αγγλικούς χαρακτήρες!
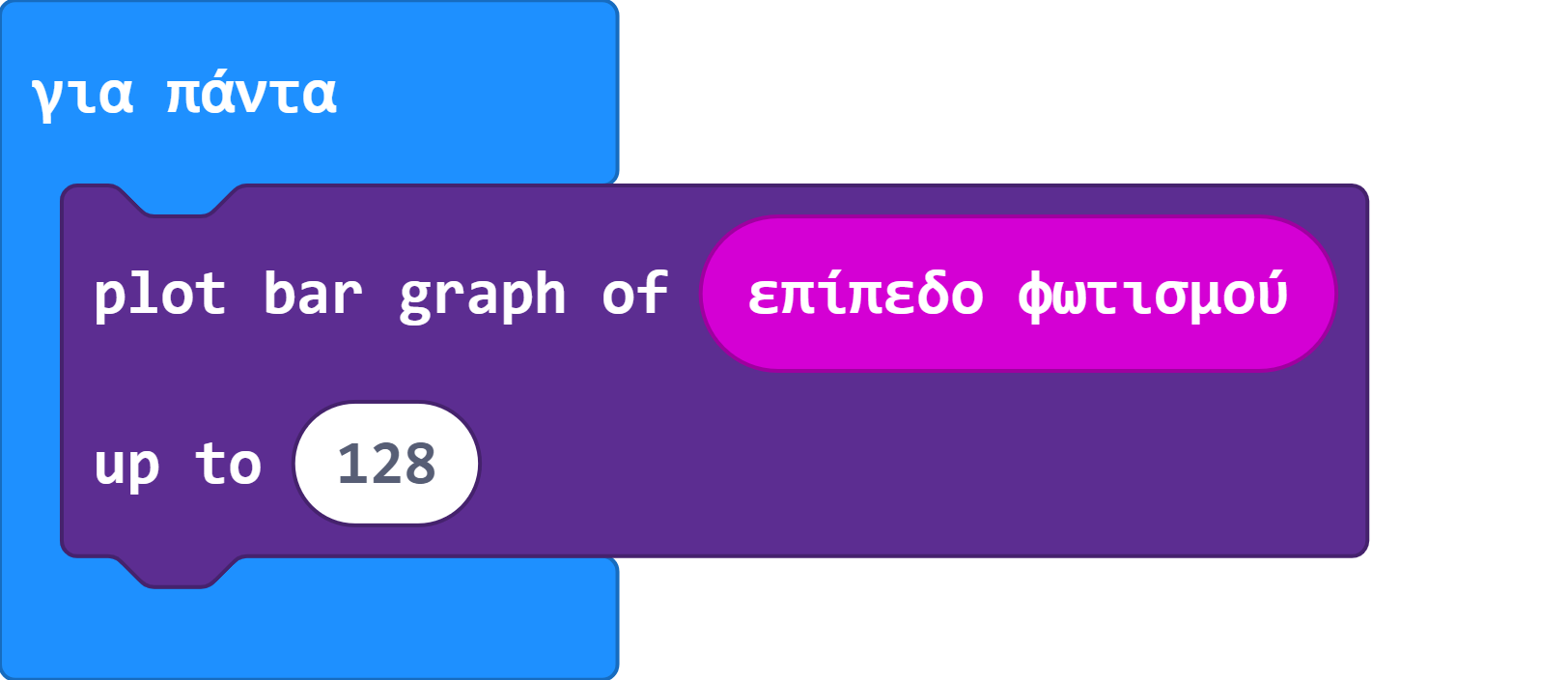
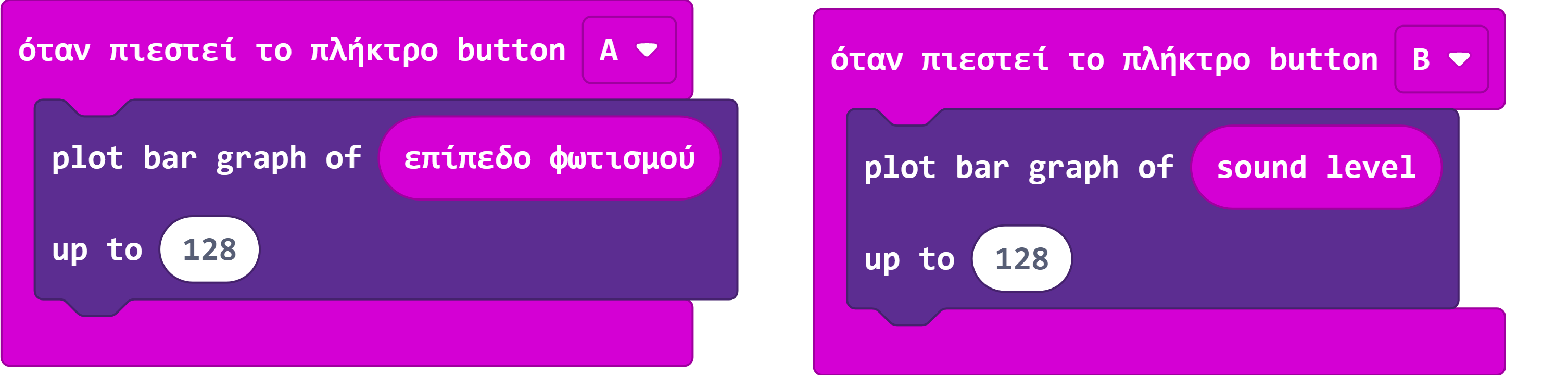
Άσκηση 2η: Μέτρηση έντασης Φωτός και Ήχου σε πραγματικό χρόνο
 Σημαντικό: Όταν έχουν συνδεδεμένη το microbit, μπορούμε να κάνουμε καταγραφή των μετρήσεων αν κάνουμε κλικ στο "Εμφάνισης κονσόλας Συσκευή"
Σημαντικό: Όταν έχουν συνδεδεμένη το microbit, μπορούμε να κάνουμε καταγραφή των μετρήσεων αν κάνουμε κλικ στο "Εμφάνισης κονσόλας Συσκευή"
Πως μπορούμε να εμφανίζεται το realtime γράφημα της έντασης του φωτός όταν πατάω το κουμπί Α και πως του ήχου όταν πατάω το κουμπί Β;
 Θεωρείτε ότι είναι ικανοποιητική η παραπάνω λύση;
Θεωρείτε ότι είναι ικανοποιητική η παραπάνω λύση;
Πως μπορώ να τροποποιήσω τον προγραμματισμό ώστε αυτό να γίνεται συνέχεια όσο πατάω τα κουμπιά;
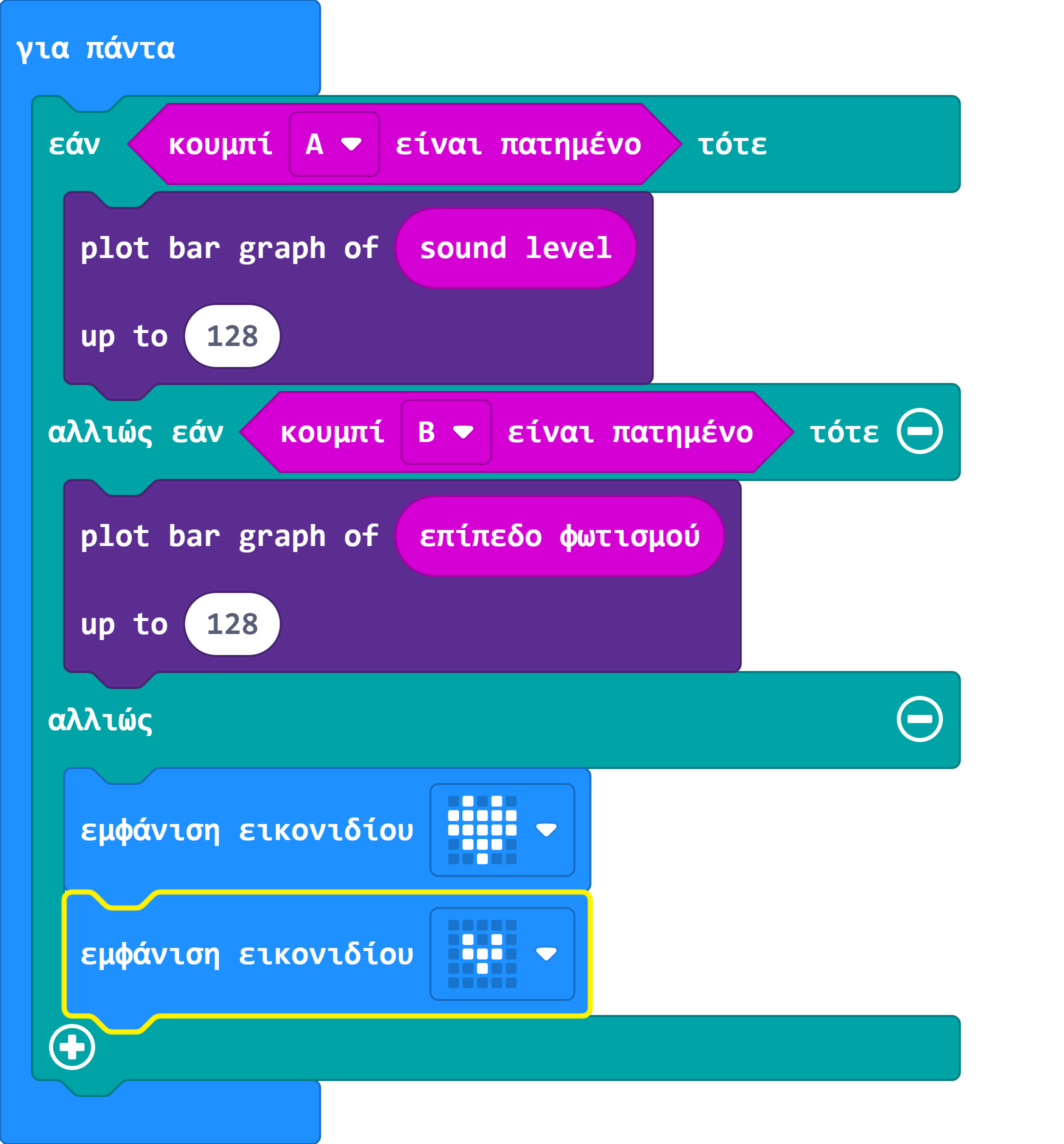
Πως εμφανίζω την ένδειξη πυξίδας με Α+Β;
Δοκιμάστε το πρόγραμμα: microbit-Meteors_v1-2 αφού το αποσυμπιέσετε και το κατεβάσετε στο microbit!
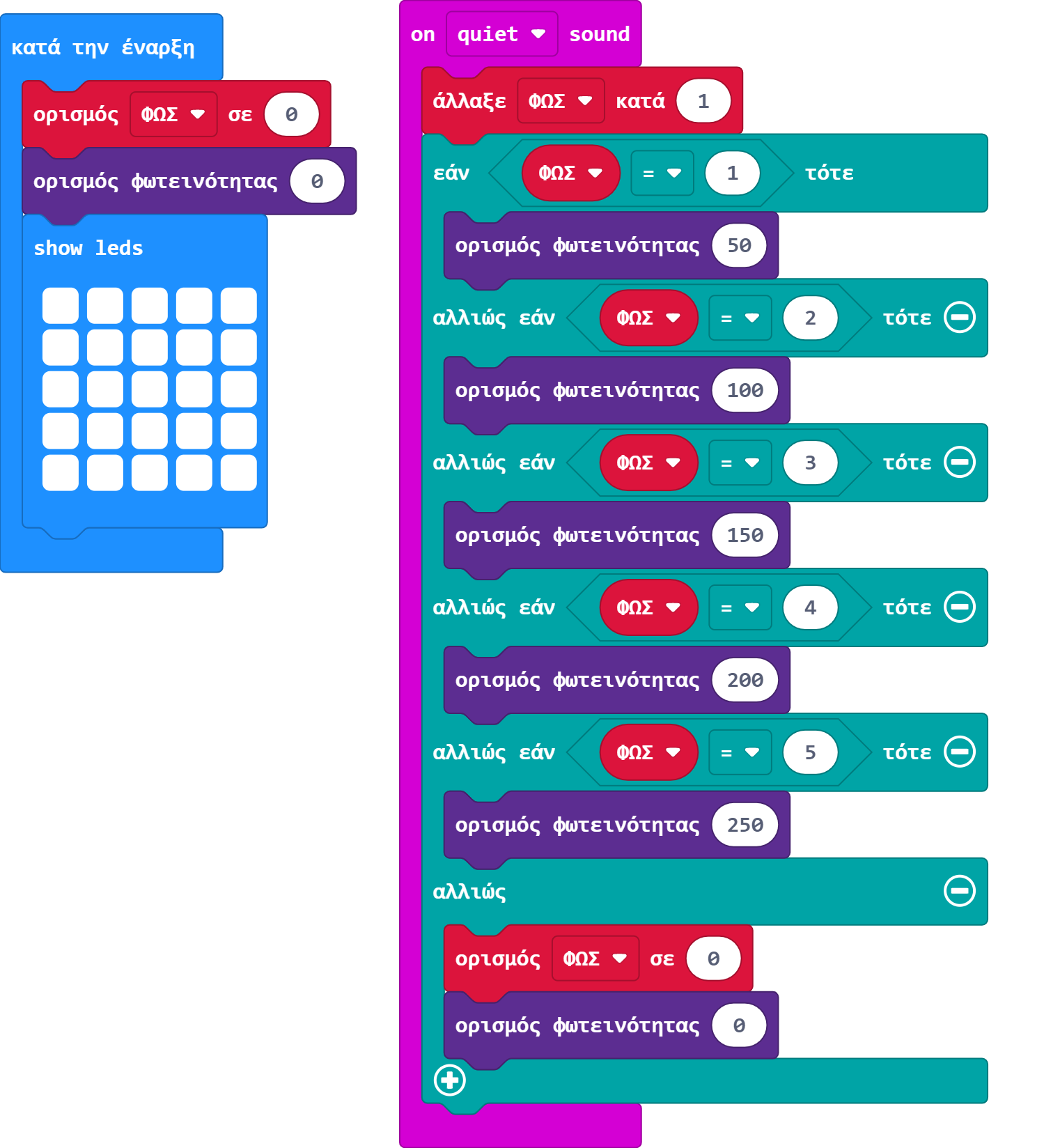
Άσκηση 1η: Χρήση μικροφώνου για άνοιγμα και κλείσιμο όλων των LED
- To τι είναι LED:
- Εντολή onLoudSound.
- Πως με δυνατό ήχο μπορούμε να ανάψουμε όλα τα LEDq
- Μπορούμε να τα κάνουμε με 2ο θόρυβο να σβήσουν; Τους αφήνω να το ερευνήσουν.
Χρήση μεταβλητής και παρουσιάζω την παρακάτω λύση.
 Πείραμα: Βάλτε ένα μπουκάλι νερό πάνω στο microbit (προσοχή να μην έχει έχει τρέξει νερό από έξω και να είναι καλά κλεισμένο) και παρατηρήστε τι γίνεται. Γιατί λειτουργεί σαν λάμπα;
Πείραμα: Βάλτε ένα μπουκάλι νερό πάνω στο microbit (προσοχή να μην έχει έχει τρέξει νερό από έξω και να είναι καλά κλεισμένο) και παρατηρήστε τι γίνεται. Γιατί λειτουργεί σαν λάμπα;
Ερώτηση: Μπορείτε να κάνετε τα leds να ανοίγουν ανά 5 με κάθε χτύπημα και μετά να κλείνουν ανά 5, για να αυξομοιώνουμε την επιθυμητή φωτεινότητα;
Παρακάτω μπορείτε να δείτε την υλοποίηση με χρήση της εντολής φωτεινότητα:
 Δείτε την παρακάτω υλοποίηση:
Δείτε την παρακάτω υλοποίηση:

Με τον κ Κ. Νικίκα, καθηγητή του ΔΕΞΥΣ , στον χώρο υποδοχής του τμήματος, ο οποίος μας παρουσίασε την τεχνολογία laser cutting.
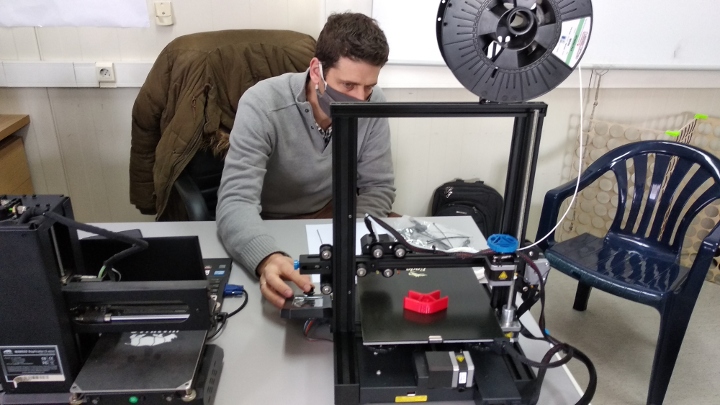
Ο καθηγητής κ Δ. Χαϊδάς, ο οποίος παρουσίασε την τεχνολογία 3d printing

Με τον καθηγητή Μ. Σκαρβέλη στο αμφιθέατρο της Σχολής.

Τα χριστουγεννιάτικα αναμνηστικά από κόντρα-πλακέ, τα οποία κόπηκαν με το laser cutter του τμήματος.
- Σύντομή επαναληπτική παρουσίαση των δυνατοτήτων του microbit
- Διαχείριση έργων και versioning.
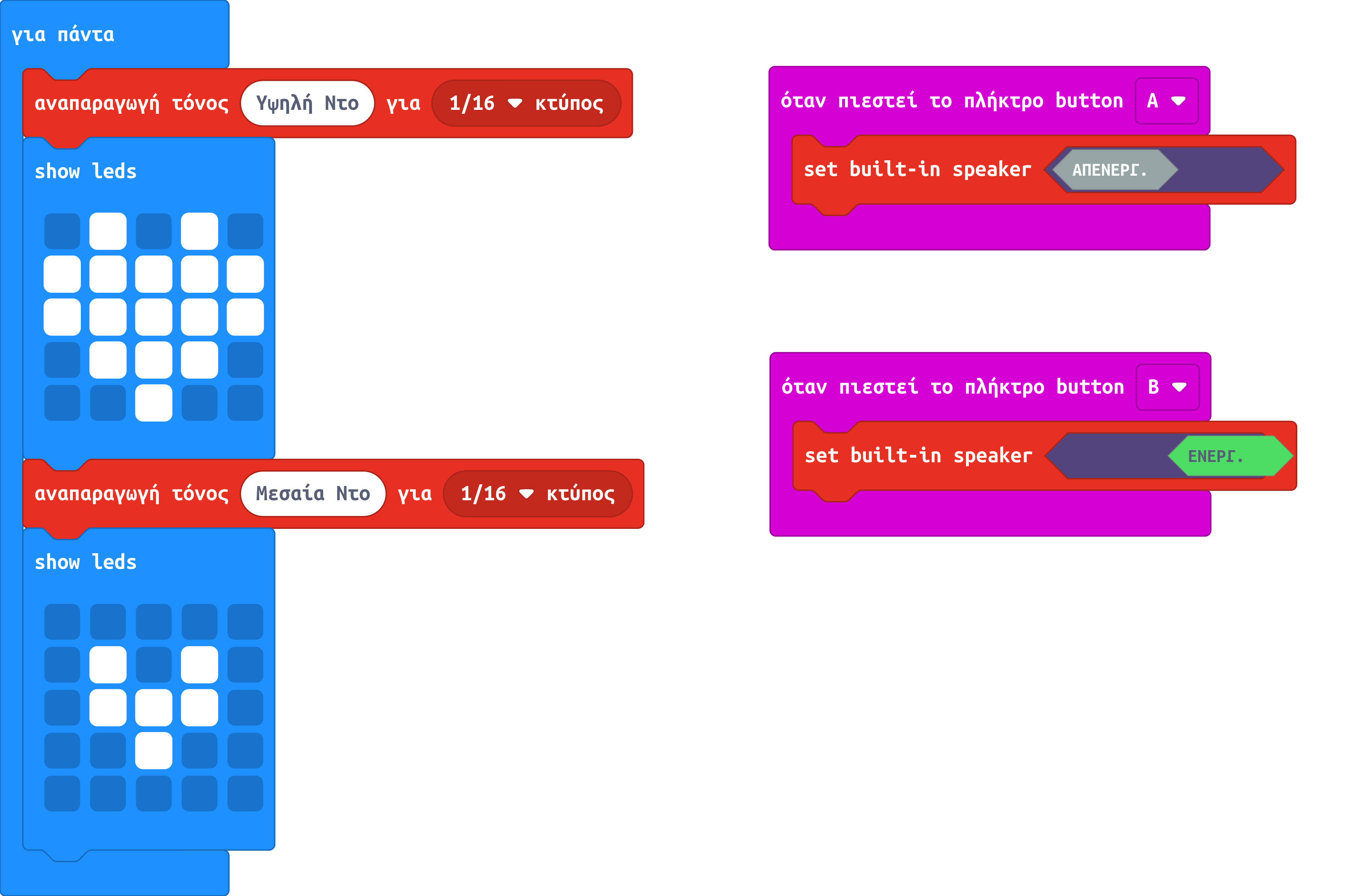
Διαπλασιασμός flashing heart και προσθήκη ήχου.
Αρχική σελίδα > Τα έργα μου > διπλασιασμός flashing heart
Προσθήκη ήχου:
 Μπορούμε να τροποιήσουμε το πρόγραμμα ώστε η εναλλαγή να γίνεται πιο γρήγορα ή πιο αργά;
Μπορούμε να τροποιήσουμε το πρόγραμμα ώστε η εναλλαγή να γίνεται πιο γρήγορα ή πιο αργά;
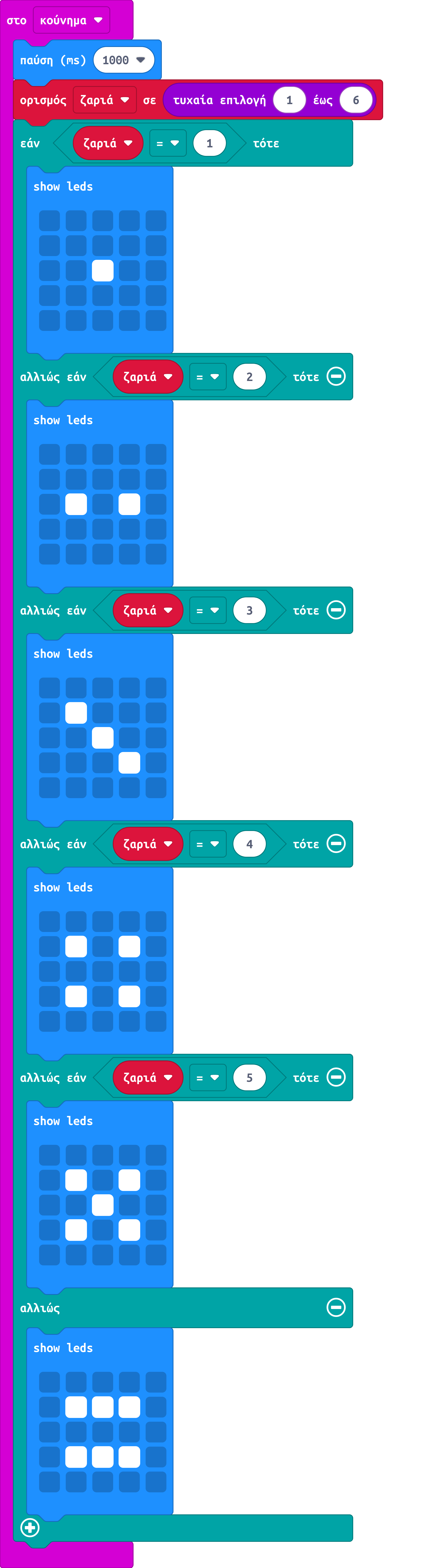
Απλό ζάρι
Ζάρι με κουκίδες
- Να γίνει εισαγωγή της μεταβλητής “ζαριά”
- Να γίνει χρήση της εντολής “εάν”
- Να εξηγηθεί η συνθήκη της εάν και πότε γίνεται το “τότε” ή το “αλλιώς”
- Να υλοποιηθεί η εμφάνιση 1 και 2 κουκίδων εάν η ζαριά=1 και 2 αντίστοιχα. Να εξηγηθεί η “αλλιώς αν”
- Να υλοποιήσουν τα παιδιά για 3-6 και να εξηγηθεί η τελευταία “αλλιώς”
ΕΙΣΑΓΩΓΗ
micro:bit
- τί είναι
- ιστορία
- v1,v2 οι διαφορές
Προγραμματισμός
- με το δικό του περιβάλλον https://makecode.microbit.org/
- με Scratch
- με το tinkercad
Προσθήκες:
- αισθητήρες και κινητήρες του arduino
- ειδικές βάσεις-υποδοχείς
Πηγές-Βίντεο
1η γνωριμία με τα διάφορα εξαρτήματα και τακτοποίηση θήκης (ταμπακιέρα) ανά ομάδα:

Τα πρώτα μου προγράμματα
- Σύνδεση microbit-usb-pc
- Άνοιγμα https://makecode.microbit.org/
- Περιβάλλον > Ελληνικά
- Σύντομη παρουσίαση περιβάλλοντος
- Εξήγηση block “κατά την έναρξη”, “για πάντα”
1o: Χρήση οθόνης (η καρδιά που πάλλεται) με 2 οθόνες
Περισσότερα για τα παραπάνω βίντεο εδώ!
- Παρουσίαση των μηχανικών μερών (γρανάζια, τροχαλίες, ιμάντες, ράγες)
- Παρουσίαση την εμπλοκή κινητήρα με 2 και 3 γρανάζια
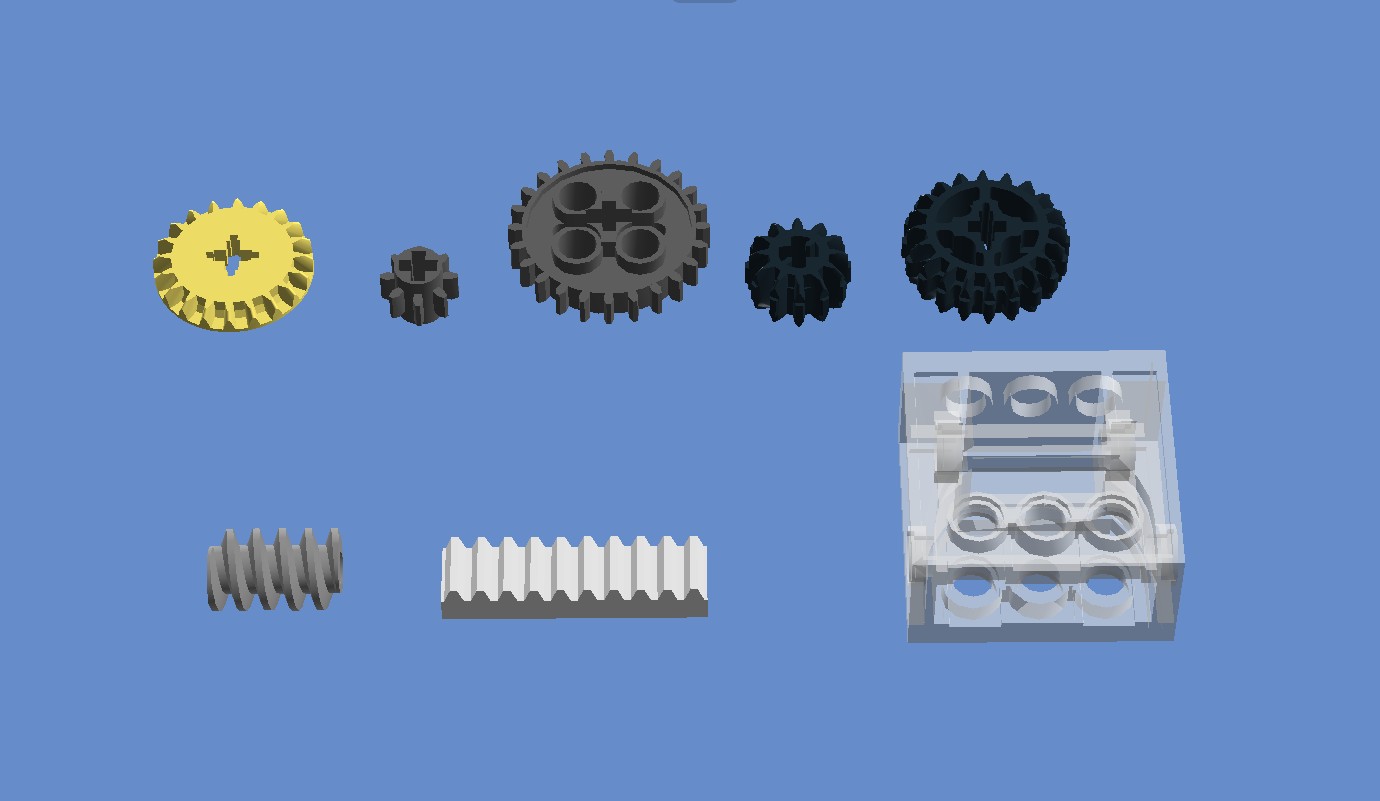
Οδοντωτά εξαρτήματα: Από αριστερά προς τα δεξιά:
1η σειρά: γρανάζι κορώνα (20δ), γρανάζι μικρό (8δ), γρανάζι μεγάλο (24δ), κωνικό γρανάζι (12δ), κωνικό γρανάζι (20δ)
2η σειρά: ατέρμων κοχλίας, οδοντωτή ράγα, θήκη ατέρμονα
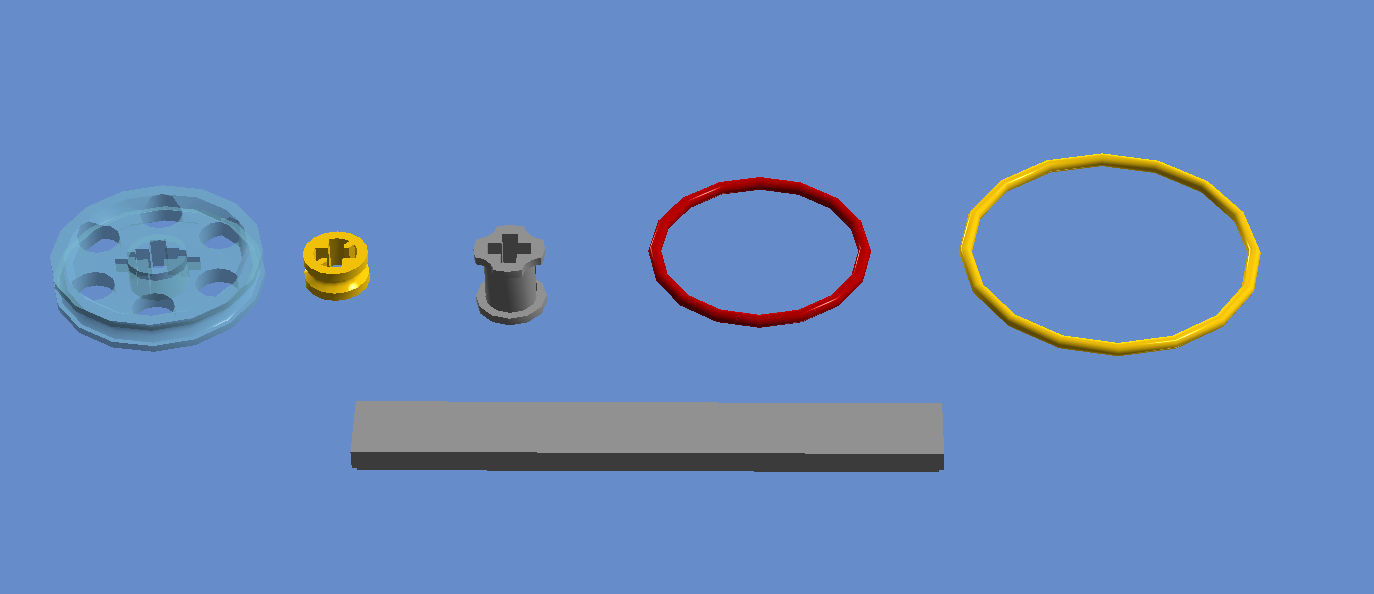
Τροχαλίες, ιμάντες και λείο εξάρτημα για τη την μετακίνηση ράγας
3. Ερωτήσεις:
Έχετε εμπλέξει διαδοχικά 5.127 γρανάζια το ένα δίπλα στο άλλο. Η κίνηση του 1ου με το 2ο είναι ομόρροπη ή αντίρροπη;
4. Κατασκευή:
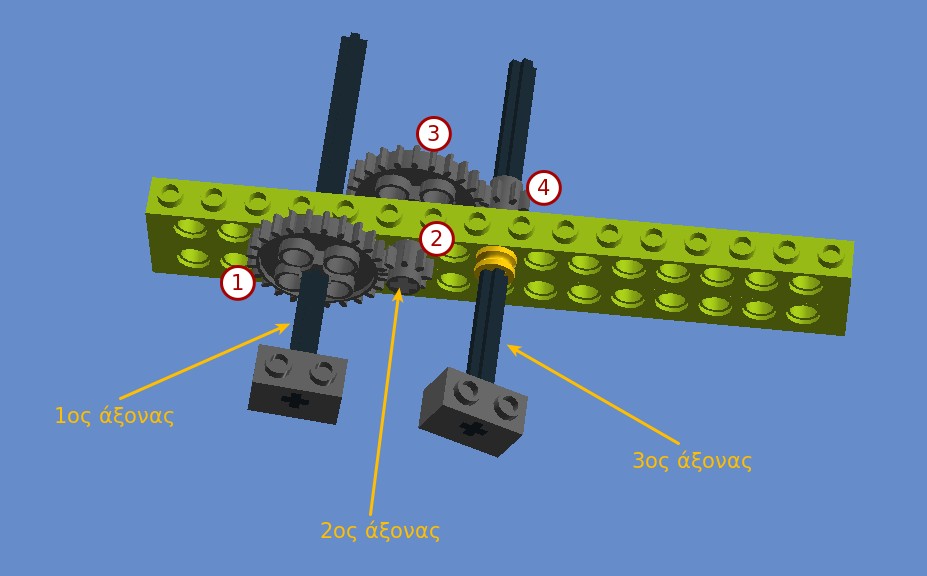 Δημιουργήστε τον παραπάνω μηχανισμό με 4 γρανάζια και 3 άξονες ακολουθώντας τις οδηγίες. Θα χρησιμοποιήσετε 2 γκρι γρανάζια με 24 δόντια και 2 γκρι γρανάζια με 8 δόντια.
Δημιουργήστε τον παραπάνω μηχανισμό με 4 γρανάζια και 3 άξονες ακολουθώντας τις οδηγίες. Θα χρησιμοποιήσετε 2 γκρι γρανάζια με 24 δόντια και 2 γκρι γρανάζια με 8 δόντια.
Τα δύο γκρι τουβλάκια 2×1 με οπή για τον άξονα θα χρησιμοποιηθούν ως δείκτες για την ευκολότερη μέτρηση των περιστροφών και επαλήθευση των υπολογισμών.
α) Υπολογίστε πόσο αυξάνεται/μειώνεται η ταχύτητα του 1ου γραναζιού σε σχέση με το 4ο γρανάζι.
β) Τι σχέση έχει η αύξηση/μείωση ταχύτητας με τη ροπή σε κάθε άξονα; Μπορείτε να εξηγήσετε τι κάνουμε όταν οδηγούμε ένα ποδήλατο με ταχύτητες σε μία απότομη ανηφόρα;
γ) Δοκιμάστε να συνδέσετε τον κινητήρα στον 1ο και στον 3ο άξονα.
δ) Με βάση το προηγούμενο ερώτημα, γιατί χρησιμοποιούμε γρανάζια και δεν αυξομειώνουμε απλά την ταχύτητα του κινητήρα; Για να βρείτε την απάντηση, δοκιμάστε να χρησιμοποιήσετε στο scratch τις κατάλληλες εντολές, ώστε ο κινητήρας να γυρνά με με την χαμηλότερη και υψηλότερη ταχύτητα.
5. Ατέρμων κοχλίας ή το γνωστό σκουληκογράναζο (worm gear)
Ετυμολογία: ατέρμων ή ατέρμονας, αυτός που δεν τερματίζει ποτέ.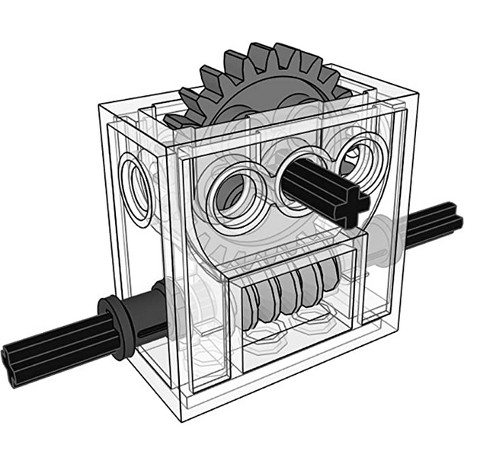
- Συναρμολογήστε τον μηχανισμό του ατέρμονα κοχλία, βάζοντας:
- τον ατέρμων κοχλία στη
- διαφανή θήκη
- προσθέστε ένα 24άρι γρανάζι
- προσθέστε άξονα στο 24άρι γρανάζι
- προσθέστε άξονα στον ατέρμονα
- προσθέστε τους δύο γκρι δακτυλίους για να μην βγαίνει ο άξονας από τη θέση του.
- α) Γυρίστε με το χέρι σας και τους δύο άξονες τι παρατηρείτε;
- β) Παρατηρήστε προσεκτικά τη λειτουργία του μηχανισμού και γράψτε πόσες φορές (ακέραια τιμή) μειώνεται η ταχύτητα περιστροφής του γραναζιού σε σχέση με τον ατέρμονα.
- γ) Σκεφτείτε μια εφαρμογή του μηχανισμού που χρησιμοποιεί τα συμπεράσματα των ερωτήσεων α) και β).
Βοήθεια: η απάντηση στο παραπάνω είναι ένας μηχανισμός που τον χρησιμοποιούν αρκετοί άνθρωποι που δεν κατοικούν σε μονοκατοικίες.
6. Επιπλέον δραστηριότητα για μετατροπή περιστροφικής κίνησης σε γραμμική
- Φτιάξτε το Πάντα που φαίνεται παρακάτω (reverse engineering από εικόνα).
Αν δυσκολευτείτε δείτε τις οδηγίες( σελ. 50 ή στο βήμα 48) .
- Προσαρμόστε το Πάντα πάνω σε μηχανισμό που θα χρησιμοποιεί:
- ράγες, κινητήρα και γρανάζια,
- θα μπορεί να κρύβει και να εμφανίζει το πάντα πίσω από έναν απλό τοίχο με τουβλάκια lego,
- Συνδέστε κινητήρα και αισθητήρα απόστασης.
- Δημιουργήστε στο scratch πρόγραμμα το οποίο θα μετακινεί το Πάντα πίσω από τον τοίχο όταν κάτι πλησιάζει και το ανάποδο.
Για δημιουργική σκέψη και συζήτηση :
Με ένα wedo και δύο κινητήρες:
- πιάσιμο και ανασήκωμα
- Εμπρός-πίσω και στροφή
Στην επόμενη συνάντηση θα έχουμε διαγωνιστική διαδικασία μεταξύ των ομάδων…
Ετοιμαστείτε!
"ΡΟΜΠΑΚΟΣ": Ο ρομποτικός ακόλουθος!
- Επανάληψη και παρουσίαση των λύσεων που ζητήθηκαν στη 2η ώρα [περίπου 20'].
Στόχος: Να φτιάξουμε έναν ρομποτικό βοηθό, ο οποίος θα μας ακολουθεί σε κάποια απόσταση. Δηλαδή αν πλησιάζουμε πολύ κοντά του θα απομακρύνεται και αν απομακρυνόμαστε θα μας ακολουθεί.
Πληροφορίες:
 Σημείωση: Μας την έκλεψε την ιδέα το Πανεπιστήμιο της Πίζας:
Σημείωση: Μας την έκλεψε την ιδέα το Πανεπιστήμιο της Πίζας:
- https://www.santannapisa.it/en/news/collaborative-robotics-belvedere-spa-and-peccioli-town-council-supported-spin-mediate-robotics
- https://www.santannapisa.it/en/news/mobot-robotic-shopping-cart-designed-santanna-school-spinoff-company-mediate-santanna-school
- VIDEO: https://www.facebook.com/mediatesrl/videos/565379440568412/
Ξέρετε τι άλλο έχει ανακαλυφθεί σε Ιταλικό πανεπιστήμιο που είχε παγκόσμια επίδραση στην εκπαιδευτικη ρομποτική;
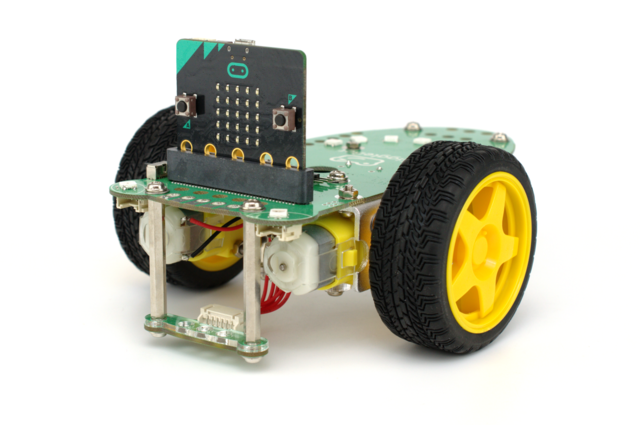
Χρησιμοποιήστε το απλό ρομπότ που συναρμολογήσατε στο προηγούμενο μάθημα.
Προγραμματίστε το ρομπότ χρησιμοποιώντας τη δομή επιλογής "εάν... τότε ... αλλιώς".
Δοκιμάστε να βρείτε τη λύση μόνοι σας. Αν όμως κολλήσετε, κοιτάξτε εδώ.
Τι παρατηρείτε; Τι συμβαίνει με το ρομπότ, αν μείνουμε ακίνητοι; Είναι επιθυμητή κατάσταση και τι μπορεί να προκαλέσει;
Πως μπορείτε να λύσετε το πρόβλημα ώστε ο ακόλουθός σας να λειτουργεί ομαλά και ακίνδυνα;
Παρουσιάστε την τελική προγραμματιστική λύση του προβλήματος.
Δύο ενδεικτικές λύσεις είναι εδώ (ο κωδικός είναι το 2^12)
Το ρομπότ σας να σταματά όταν βρίσκει εμπόδιο ( το led να γίνει πορτοκαλί ) και να να ξεκινά όταν αυτό απομακρύνεται (το LED πράσσινο). Όταν ανιχνεύει ότι υπάρχει κενό μπροστά (προσοχή μην κάνει βουτιά το πάτωμα!!!) να σταματά εντελώς ( το led να γίνει κόκκινο) και να ακούγεται ηχητική ειδοποίηση.
Κοιτάξτε την παρακάτω κατασκευή του βραχίονα στήριξης του αισθητήρα. Κάντε δοκιμές με την κλίση του αισθητήρα ως προς την επιφάνεια του εργαστηριακού πάγκου. Δοκιμάστε αν μπορείτε να διακρίνετε πότε υπάρχει εμπόδιο μπροστά, πότε ο δρόμος είναι ελεύθερος και πότε κενό…
Συμβουλή: Ενεργοποιήστε την εμφάνιση της τιμής του αισθητήρα απόστασης στην οθόνη του scratch και δοκιμάστε να πλησιάσετε το ρομποτάκι σας σε εμπόδιο ή κενό ή ελεύθερη επιφάνεια. Θα πρέπει και στις τρεις περιπτώσεις να έχετε ξεκάθαρες διαφορετικές περιπτώσεις τιμών. Εάν όχι θα πρέπει να αλλάξετε την κλίση του αισθητήρα και τη θέση του βραχίονα.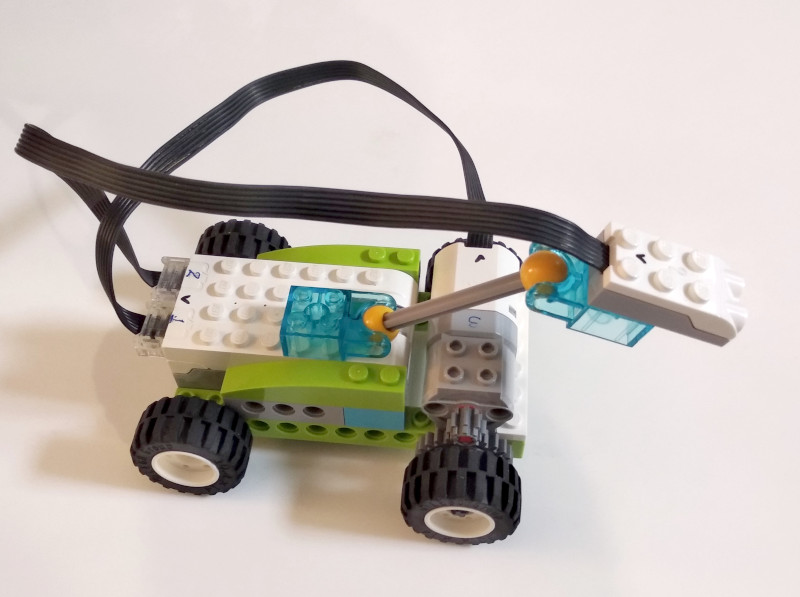 1
1
- Παρουσίαση του πακέτου LEGO WeDo 2.0
- Εξοικείωση με τα εξαρτήματα [κλικ εδώ]
- Εξοικείωση με την ονοματολογία των δομικών στοιχείων lego[κλικ εδώ]
- Παρουσίαση κατασκευών:
- Επίδειξη του προγραμματιστικού περιβάλλοντος της LEGO
- Επίδειξη σύνδεσης με το προγραμματιστικό περιβάλλον του Scratch
- 1η κατασκευή: οδηγίες για απλό όχημα [http://nikmavr.sites.sch.gr//nik_html/simplestvehicle.pdf]
- προγραμματισμός για να προχωρά για 2 δευτερόλεπτα όταν πατήσετε το πλήκτρο του διαστήματος (spacebar). Ίσως χρειαστεί να αλλάξετε την φορά περιστροφής του κινητήρα. Δείτε το παρακάτω παράδειγμα.
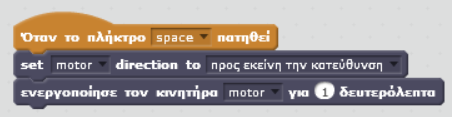
- βάλτε το όχημα να ξεκινάει πάντα από το ίδιο σημεία και παρατηρήστε αν διανύει πάντα την ίδια απόσταση κάθε φορά που πατάτε το spacebar (κάντε το 4 φορές). Γιατί νομίζετε ότι συμβαίνει αυτό;
- Τροποποιήστε τον προγραμματισμό ώστε να σταματά για 1 δευτερόλεπτο και να επιστρέφει στην αρχική του θέση.
- είναι ρομπότ;
- τι χρειάζεται για να στρίβει;
- τι θα γίνει αν αλλάξετε τη θέση των 2 γραναζιών; Δοκιμάστε το. Όπα!!! Πως το εξηγείτε;
- προγραμματισμός για να προχωρά για 2 δευτερόλεπτα όταν πατήσετε το πλήκτρο του διαστήματος (spacebar). Ίσως χρειαστεί να αλλάξετε την φορά περιστροφής του κινητήρα. Δείτε το παρακάτω παράδειγμα.
- Αυτονομία: χρήση του αισθητήρα απόστασης ώστε:
-
- α) όταν βρίσκει εμπόδιο να σταματά και να ανάβει κόκκινο το led
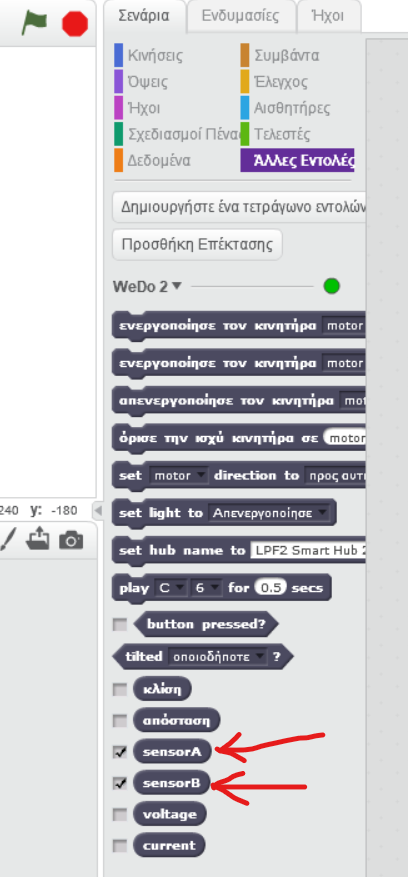
- β) όταν το εμπόδιο απομακρύνεται να συνεχίζει και το led να γίνεται πράσινο.
- γ) πως μπορούμε να τροποποιήσουμε το πρόγραμμα ώστε αυτή η διαδικασία να επαναλαμβάνεται συνεχώς;
- α) όταν βρίσκει εμπόδιο να σταματά και να ανάβει κόκκινο το led
-
-
-
-
- Σε όλες τις αυτόματες διαδικασίες και άρα στα ρομπότ, θα παρατηρήσετε ότι υπάρχει πάντα μια ομάδα εντολών που εκτελείται συνεχώς!!!!
Και μια ομάδα εντολών που εκτελείται όταν ανοίγουμε το ρομπότ (αρχικοποίηση).
Γιατί; - Είναι ρομπότ;
- Σε όλες τις αυτόματες διαδικασίες και άρα στα ρομπότ, θα παρατηρήσετε ότι υπάρχει πάντα μια ομάδα εντολών που εκτελείται συνεχώς!!!!
-
-
Σημείωση: Η λύση είναι εδώ (αλλά μην την δείτε αν δεν προσπαθήσετε) και μην ξεχνάτε ότι υπάρχουν πολλές διαφορετικές λύσεις στο ίδιο πρόβλημα!
