Τέτοιοι κινητήρες είναι οι ηλεκτρικοί, οι κινητήρες εσωτερικής καύσης, οι ατμοστρόβιλοι, οι υδραυλικοί κινητήρες κ.α.
Οι ηλεκτρικοί κινητήρες δουλεύουν είτε με συνεχές (dc) είτε με εναλλασσόμενο ρεύμα (ac). Στις βιομηχανίες οι περισσότεροι κινητήρες και ιδιαίτερα όσοι κάνουν βαριές δουλειές είναι εναλλασσομένου ρεύματος και οι περισσότεροι τριφασικοί.
Στην εκπαιδευτική ρομποτική χρησιμοποιούμε μόνο κινητήρες που δουλεύουν με συνεχές ρεύμα ή παλμούς συνεχούς ρεύματος και στην πλειονότητά τους, δουλεύουν με τάση 3-12V.
Άρα στη συνέχεια:
Είδη ηλεκτρικών κινητήρων
Στη ρομποτική χρησιμοποιούμε τρία είδη κινητήρων (Σχ.1). Αν και οι 3 κατηγορίες που παρουσιάζονται εδώ δουλεύουν με συνεχές ρεύμα, όταν λέμε dc motors, εννούμε τους απλούς κινητήρες συνεχούς ρεύματος ενώ τα άλλα είδη (που επίσης δουλεύουν με συνεχές ρεύμα) λέγονται σερβοκινητήρες και βηματικοί κινητήρες:
- Απλοί κινητήρες (dc motors): Είναι οι πιό απλοί και φθηνοί κινητήρες. Τα περισσότερα παιχνίδια χρησιμοποιούν τέτοιους απλούς κινητήρες. Έχουν 2 καλώδια στα οποία δίνουμε ρεύμα. Όσο μεγαλύτερη η τάση τροφοδοσίας τόσο γρηγορότερα περιστρέφεται ο άξονάς τους. Αν αντιστρέψουμε την τάση αλλάζει η φορά περιστροφής. Δεν έχουν ακρίβεια στην κίνηση. Στο Σχήμα 1, βλέπουμε στο 1) έναν κινητήρα έτοιμο για σύνδεση με ρόδα και 2) η πιό συνηθισμένη μορφή μικρού κινητήρα που βρίσκεται στα περισσότερα παιδικά παιχνίδα.
- Βηματικοί κινητήρες (stepper motors): Χρησιμοποιούνται για ελεγχόμενη κίνηση ακριβείας. Δέχονται παλμούς και σε κάθε παλμό περιστρέφονται ελάχιστα (συνήθως λίγες μοίρες). Χρησιμοποιούνται εκεί όπου θέλουμε ακρίβεια όπως π.χ. στους εκτυπωτές ψεκασμού. Ο 28BYJ-48 είναι ο πιο γνωστός βηματικός κινητήρας και έχει 5 καλώδια.
- Σερβοκινητήρες (servo motors): Περιστρέφονται συγκεκριμένη γωνία (συνήθως από 0-180 º) και διατηρούν τη γωνία αυτή. Είναι σχετικά φθηνοί και τους χρησιμοποιούμε αρκετά στη ρομποτική για την κίνηση βραχιόνων ή για τον έλεγχο του τιμονιού στα τηλεκατευθυνόμενα. Δεν περιστρέφονται τόσο γρήγορα όσο οι απλοί κινητήρες αλλά έχουν πολύ μεγαλύτερη ροπή καθώς πάντα περιλαμβάνουν γρανάζια μέσα στη συσκευασία τους. Ελέγχονται στέλνοντας παλμούς διαφορετικής δάρκειας. Στο παρακάτω σχήμα: 6) απλός σερβοκινητήρας 0-270 º, με πλαστικά γρανάζια 7) απλός σερβοκινητήρας 0-180 º, με μεταλλικά γρανάζια και 8) σερβοκινητήρας συνεχούς περιστροφής. Στην τελευταία περίπτωση, με τους παλμούς, αντί να ελέγχουμε τη γωνία περιστροφής ελέγχουμε την ταχύτητα και την φορά περιστροφής.
Συνήθως έχουν 3 καλώδια.
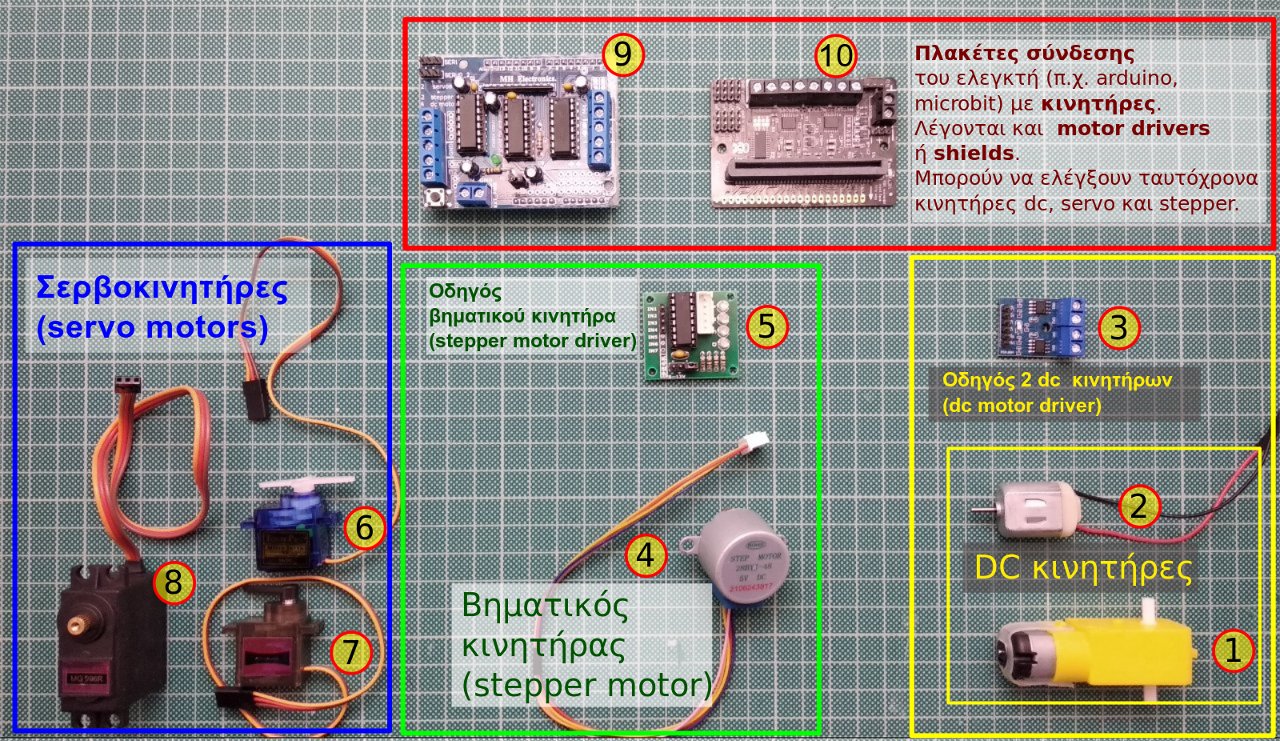
Σχήμα 1: Είδη κινητήρων (motors) και πλακέτες οδήγησής τους (motor drivers)
Στο παραπάνω σχήμα βλέπουμε:
- Απλούς κινητήρες συνεχούς ρεύματος: 1 και 2
- Βηματικό κινητήρα: 4
- Σερβοκινητήρες: 6, 7 και 8
- Πλακέτες οδήγησης κινητήρων: 3, 5, 9 (για arduino) και 10 (για micro:bit)
Συνήθως οι κινητήρες (εκτός από τους απλούς dc) έχουν καλώδια με τα οποία τους συνδέουμε στην τροφοδοσία (π.χ. 5 ή 12 V) και καλώδια τα οποία τα συνδέουμε στον μικροελεγκτή (π.χ. arduino, microbit) με τον οποίο τους ελέγχουμε.
Πλακέτες οδήγησης κινητήρων (motor drivers)
Οι κινητήρες για να περιστραφούν χρειάζονται αρκετό ρεύμα και μάλιστα όσο πιο πολύ δυσκολεύονται, τόσο περισσότερο ρεύμα απαιτούν.
Αυτό έχει ως συνέπεια οι συνηθισμένοι μικροελεγκτές arduino και microbit, να μην μπορούν να τους τροφοδοτήσουν με το απαιτούμενο ρεύμα παρά μόνο να τους ελέγξουν στέλνοντας σήμα (το οποίο και απαιτεί μικρό ρεύμα) μέσω ενός καλωδίου.
Δηλαδή οι μικροελεγτές ΔΕΝ ΜΠΟΡΟΥΝ να ΟΔΗΓΗΣΟΥΝ κινητήρες αλλά μόνο να τους ελέγξουν.
Για αυτό τον λόγο χρησιμοπούμε ενδιάμεσες πλακέτες οι οποίες λέγονται πλακέτες οδήγησης κινητήρων ή motor drivers (Σχήμα 1: 3, 5, 9, 10). Στην πλακέτα του arduino επειδή κουμπώνουν πάνω στα pins του (και ομοιάζουν σαν ασπίδα), λέγονται και motor shields (Σχήμα 1: 9).
Στους κινητήρες συνεχούς ρεύματος για να αλλάξουμε την φορά περιστροφής θα πρέπει να αντιστρέψουμε τα καλώδια τροφοδοσίας. Αυτό είναι εξαιρετικά δύσκολο να γίνει σε μια ρομποτική κατασκευή και καθόλου πρακτικό. Και σε αυτή την περίπτωση, τη λύση δίνουν οι πλακέτες οδήγησης οι οποίες μπορούν να ελεγχθούν από το microbit ή το arduino και να αλλάξουν τη φορά περιστροφής του κινητήρα χωρίς να αλλάξουμε θέση στα καλώδια τροφοδοσίας των κινητήρων.
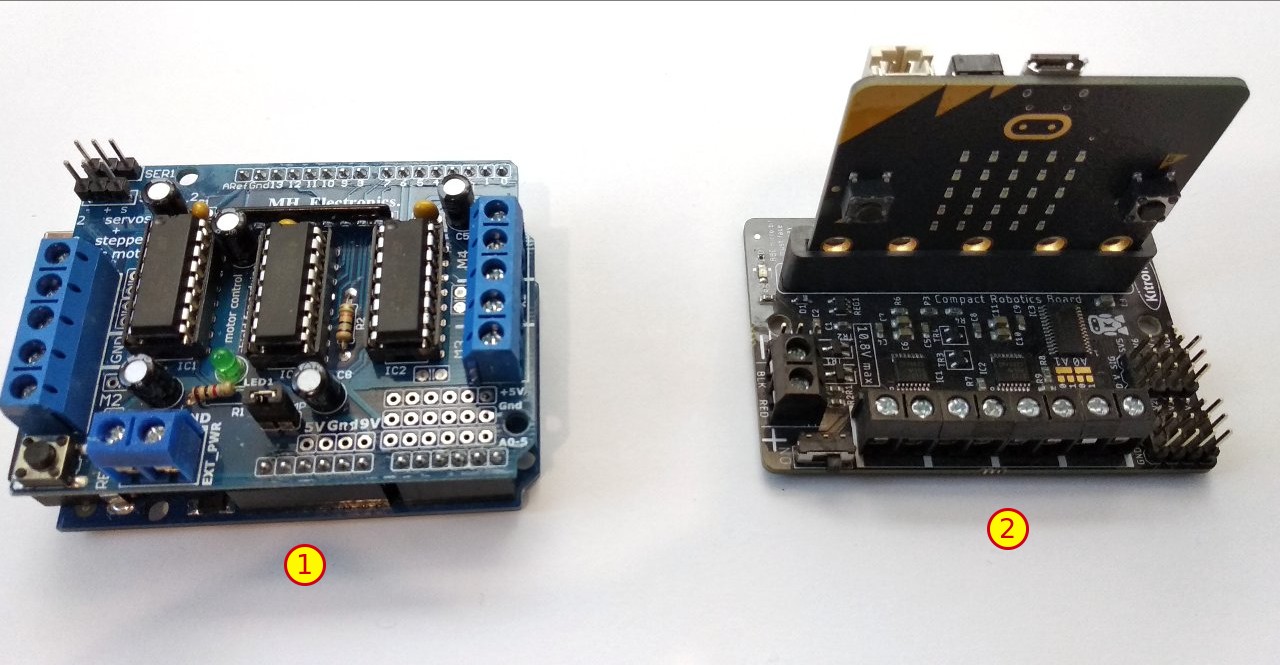
Σχήμα 2: Motor drivers πλακέτες. Η (1) αφορά το arduino ενώ η (2) το microbit
Άσκηση
Στο κουτί τις ομάδας σας, εντοπίστε τα 3 είδη κινητήρων (motors) και τις αντίστοιχες πλακέτες οδήγησης κινητήρων (motor drivers).
Παρατηρήστε πόσα καλώδια έχει κάθε κινητήρας. Γιατί;
Πηγές:
