Το Σάββατο 26 Ιουνίου 2021 πραγματοποιήθηκε o 7ος Πανελλήνιος Διαγωνισμός Εκπαιδευτικής Ρομποτικής 2021 WRO Hellas (υπό την Αιγίδα του Υπουργείου Παιδείας και Θρησκευμάτων) για μαθητές Δημοτικού με θέμα «Από τον Αρχιμήδη στον Da Vinci».

Η ομάδα ” Robo-Hooligans” του 1ου Δημοτικού Σχολείου Παλαμά Καρδίτσας κατέκτησε την 1η θέση με την κατασκευή “Βελλιπέλτης” (Βαλλίστρα+Καταπέλτης).


Μέλη Ομάδας:
- Αναγνωστοπούλου Αρετή
- Αρχοντούλη Αποστολία
- Καραμαλίγκα Ηλιάνα
- Μπακρατσής Σωτήριος
- Ντίκας Ευθύμης
- Τσιάπουλας Αναστάσιος
Προπονητής
- Μαυραντζάς Νικόλαος (Εκπαιδευτικός ΠΕ86)
Περιγραφή
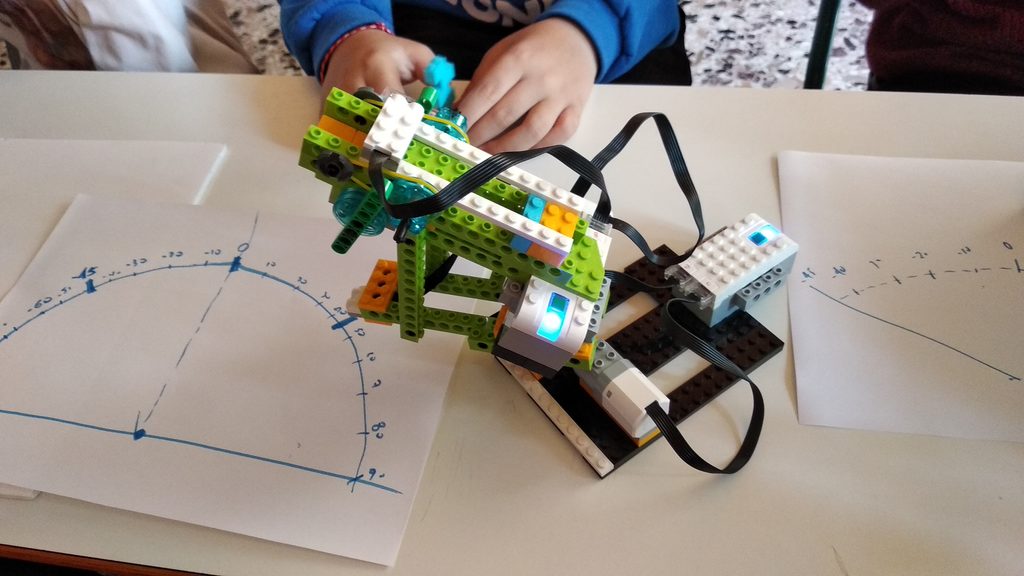
 Η ρομποτική κατασκευή μας (Βαλλιπέλτης) αποτελεί την εξέλιξη του καταπέλτη του Αρχιμήδη και της βαλλίστρας του Λεονάρντο Ντα Βίντσι. Το ρομπότ μας ανιχνεύει την παρουσία του εχθρού σε συγκεκριμένα σημεία του ορίζοντα, στρέφεται προς τα συγκεκριμένα σημεία με αρκετή ακρίβεια και ρίχνει ένα βέλος. Ο βαλλιπέλτης επανοπλίζει αυτόματα και επιστρέφει στην αρχική της θέση. Η φόρτωση του βέλους γίνεται χειροκίνητα.
Η ρομποτική κατασκευή μας (Βαλλιπέλτης) αποτελεί την εξέλιξη του καταπέλτη του Αρχιμήδη και της βαλλίστρας του Λεονάρντο Ντα Βίντσι. Το ρομπότ μας ανιχνεύει την παρουσία του εχθρού σε συγκεκριμένα σημεία του ορίζοντα, στρέφεται προς τα συγκεκριμένα σημεία με αρκετή ακρίβεια και ρίχνει ένα βέλος. Ο βαλλιπέλτης επανοπλίζει αυτόματα και επιστρέφει στην αρχική της θέση. Η φόρτωση του βέλους γίνεται χειροκίνητα.
Η κατασκευή του Ρομπότ
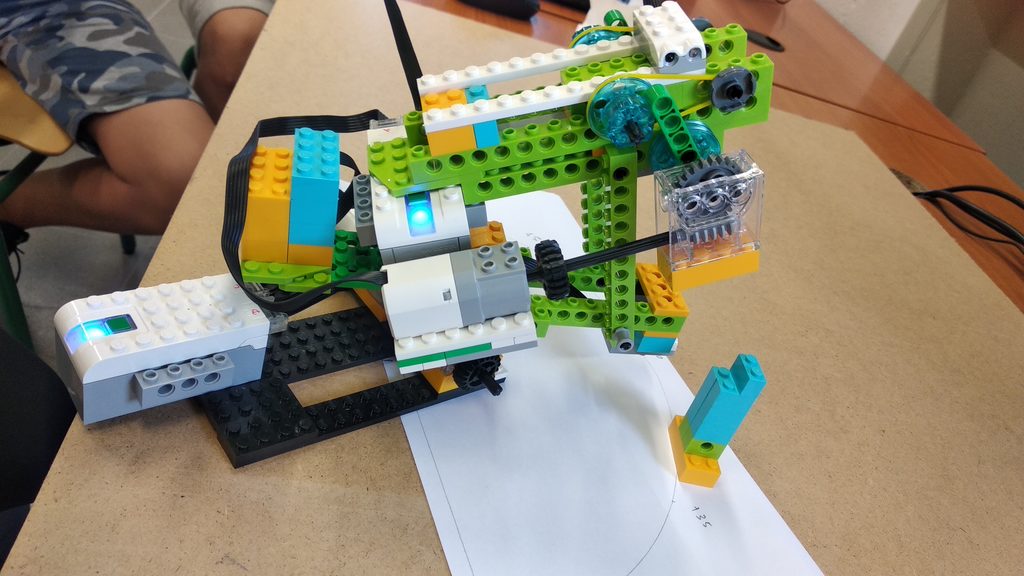
Το ρομπότ μας είναι μια περιστρεφόμενη, αυτόματης στόχευσης, βαλλίστρα. Χρησιμοποιεί 2 hubs LEGO WeDo 2.0.
Στις 4 θύρες (Α, Β, C, D) συνδέουμε αντίστοιχα:
Α: τον κινητήρα κίνησης όπλισης της βαλλίστρας,
Β: τον αισθητήρα κίνησης για την ολοκλήρωση της όπλισης,
C: τον κινητήρα περιστροφής της βαλλίστρας,
D: τον αισθητήρα κίνησης για την περιστροφή της βαλλίστρας στην αρχική θέση.
Επίσης χρησιμοποιείται μια κάμερα η οποία ανιχνεύει κίνηση στη θέση 6 κόκκινων κουκίδων (σημεία που παρακολουθούμε για την εμφάνιση εχθρού) και 6 μπλε κουκίδων (σημεία που χρησιμοποιούνται για να σταματήσει η περιστροφή της βαλλίστρας ώστε να είναι σε ευθεία βολής με κάθε αντίστοιχη κόκκινη κουκίδα).



Αυτοματισμοί:
Η κατασκευή μας περιλαμβάνει 4 αυτοματισμούς:
- Η όπλιση ξεκινά μετά από κάθε ρίψη βέλους και σταματάει αυτόματα με τον 1ο αισθητήρα κίνησης (ανιχνεύει πότε έχει ολοκληρωθεί η περιστροφή του βραχίονα όπλισης ) ώστε η βαλλίστρα να είναι έτοιμη για την επόμενη ρίψη.
- Το ρομπότ-βαλλίστρα μετά από κάθε ρίψη επιστρέφει στην ίδια αρχική θέση ανεξάρτητα με το πόσο έχει περιστραφεί για την ρίψη . Για αυτόν τον λόγο αριστερά της βαλλίστρας υπάρχει ένας πύργος ο οποίος ανιχνεύεται από τον 2ο αισθητήρα κίνησης και σηματοδοτεί την θέση εκκίνησης περιστροφής.
- Η κάμερα ανιχνεύει αυτόματα την παρουσία εχθρού σε 6 σημεία (κόκκινες κουκίδες ) μπροστά από τη βαλλίστρα και ξεκινά η διαδικασία περιστροφής της βαλλίστρας.
- Μπροστά από τη βαλλίστρα υπάρχει εκτεταμένος ένας βραχίονας ο οποίος σταματά όταν η κάμερα ανιχνεύσει ότι ο βραχίονας έχει φθάσει πάνω από την αντίστοιχη μπλε κουκίδα. Σε κάθε κόκκινη κουκίδα ανίχνευσης εχθρού αντιστοιχεί μια μπλε κουκίδα με την οποία σταματά με ακρίβεια και ρίχνει το βέλος η βαλλίστρα.
Η περιγραφή της τελικής υλοποίησης με την οποία κερδίσαμε την 1η θέση
Στην εβδομάδα που μεσολάβησε από την πρόκρισή μας μέχρι τον τελικό στις 26 Ιουνίου 2021, εξελίξαμε ακόμη περισσότερο τη βαλλίστρα μας.
Το πως φθάσαμε στη νικητήρια κατασκευή μπορείτε να το δείτε στο παρακάτω βίντεο:
Το βίντεο συμμετοχής στον διαγωνισμό
Στο παρακάτω βίντεο οι μαθητές της ομάδας μας, εξηγούν την κατασκευή και τον προγραμματισμό του ρομπότ.
