To Lego WeDo είναι ένα πακέτο εισαγωγής στη ρομποτική για παιδιά δημοτικού και όχι μόνο.
Προγραμματίζεται και ελέγχεται:
- Με το scratch (δωρεάν) και είναι η προσωπική μου πρόταση για το σχολείο. Οι δυνατότητες είναι απλά απεριόριστες!
- Με δικό του πρόγραμμα το οποίο είναι καθαρά συμβολικό-οπτικό και προγραμματιστικά έχει λιγότερες δυνατότητες από το Scratch. Ωστόσο μπορεί να χρησιμοποιηθεί από μικρότερες ηλικίες καθώς έχει μικρές έως καθόλου απαιτήσεις ανάγνωσης, αν και η γνώση των αριθμών είναι απαραίτητη.
Στο WeDo 1.0 (παλιά έκδοση) έπρεπε το hub να είναι συνεχώς συνδεδεμένο μέσω usb καλωδίου με τον υπολογιστή.
Στη συνέχεια θεωρούμε ότι χρησιμοποιούμε LEGO WeDo 2.0.
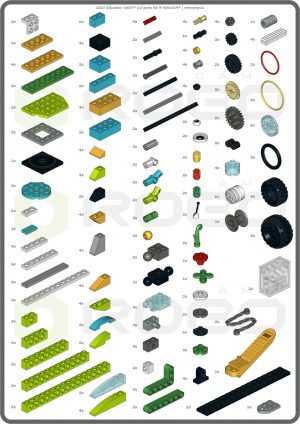
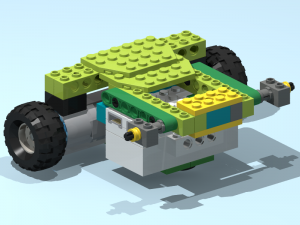
Το βασικό πακέτο περιλαμβάνει:
- αισθητήρα κλίσης με τις εξής αναγνωριζόμενες κλίσεις:

- δεξιά
- αριστερά
- κάτω εμπρός τμήμα
- κάτω πίσω τμήμα
- εντελώς επίπεδο
- αισθητήρα απόστασης (περίπου 0-10 εκατοστά)

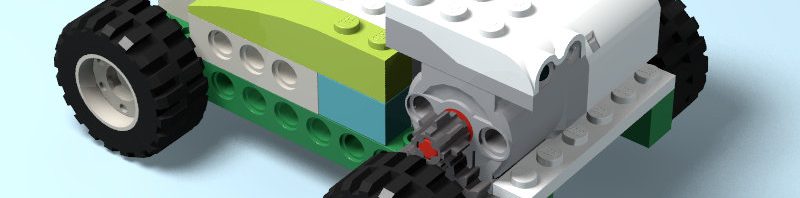
- κινητήρα ρυθμιζόμενο για περιστροφή δεξιά ή αριστερά και ρυθμιζόμενης ταχύτητας

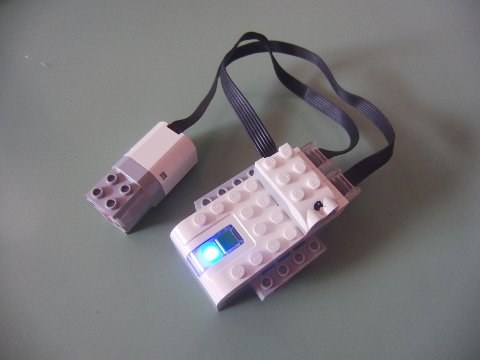
 το usb hub που είναι η κεντρική μονάδα διασύνδεσης αισθητήρων και κινητήρα με τον υπολογιστή.
το usb hub που είναι η κεντρική μονάδα διασύνδεσης αισθητήρων και κινητήρα με τον υπολογιστή.
Έχει δύο υποδοχές όπου κουμπώνουν πάνω του οποιοσδήποτε συνδυασμός του κινητήρα και των δύο αισθητήρων.
Επικοινωνεί με τον υπολογιστή ασύρματα με bluetooth.
Για να λειτουργήσει χρειάζεται δύο μπαταρίες ΑΑ.
Για όσους συναδέλφους ενδιαφέρονται, μπορείτε να βρείτε, στην παρακάτω παρουσίαση, την πρότασή μου για το πως δημιουργούμε και οργανώνουμε μία διαγωνιστική ομάδα ρομποτικής στο σχολείο μας :
Σύσταση ομάδων Ρομποτικής 2015-16.pdf [μέγεθος 490Kb ]
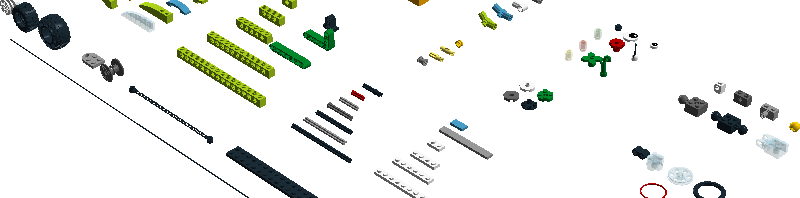
Τέλος για την εισαγωγή των μαθητών στην ρομποτική με τη χρήση του εκπαιδευτικού πακέτου LEGO WeDo, μπορείτε να χρησιμοποιήσετε την παρακάτω παρουσίαση, η οποία αφορά το WeDo 1.0 αλλά τα περισσότερα δομικά στοιχεία στοιχεία και το πως δουλεύουν (ονοματολογία, γρανάζια, τροχαλίες, λαστιχάκια-ιμάντες) είναι ίδια με το WeDo 2.0:
- LEGO WeDo επιμέρους στοιχεία – δυνατότητες.odp [μέγεθος 3.5Mb με κινούμενες εικόνες gif. Ανοίγει με το δωρεάν libreoffice]
- LEGO WeDo επιμέρους στοιχεία – δυνατότητες.pdf [μέγεθος 270Kb, χωρίς κινούμενες εικόνες]
Σύνδεση LEGO WeDo 2.0 hub με τον υπολογιστή μας

Αντάπτορας Bluetooth 4.0 BLED 112
Για να συνδέσετε το Lego wedo 2.0 hub πρέπει να έχετε ΗΥ με bluetooth 4.0. Συνήθως τα καινούργια laptop έχουν bluetooth 4.0 ή και νεότερο. Αν έχετε παλιό φορητό ΗΥ (laptop) ή σταθερό τότε θα πρέπει να αγοράσετε ένα αντάπτορα Bluetooth 4.0.
Σας συνιστώ να αγοράσετε έναν αντάπτορα Bluetooth 4.0 BLED 112 για να μπορέσετε να συνδέσετε μέχρι και 3 lego wedo 2.0 hubs στον ίδιο ΗΥ χρησιμοποιώντας έναν αντάπτορα.
Περισσότερα εδώ: http://www.picaxe.com/Teaching/Other-Software/Scratch-Helper-Apps/
Μπορούμε να επιτύχουμε τη σύνδεση hub – HY – Scratch με δύο τρόπους:
- Εγκαθιστώντας την πρόσθετη μικροεφαρμογή S2Bot (S2Bot App) στον περιηγητή Google Chrome. Στη συνέχεια το S2bot ανοίγει ανεξάρτητα από τον Chrome. Αυτή τη μέθοδο χρησιμοποιώ και παρουσιάζω παρακάτω.
- Εγκαθιστώντας το S2Bot σαν ανεξάρτητη εφαρμογή (S2Bot Native). η οποία πλέον σταμάτησε να αναπτύσσεται). Οδηγίες μπορείτε να δείτε εδώ.
Στη συνέχεια θα υποθέτω ότι έχετε προμηθευτεί τον αντάπτορα BLED 112.
(Σημ.: τον βρήκα 15€+ΦΠΑ στη “Δημιουργική μάθηση” ενώ στο skroutz.gr στις 15-2-18 βρήκα μόνο μία πρόταση σχεδόν στα διπλάσια χρήματα. Ωστόσο μια αναζήτηση μόνο καλό θα σας κάνει καθώς οι τιμές αλλάζουν τόσο στα Ελληνικά online καταστήματατα όσο και στα ξένα καταστήματα).
Εγκατάσταση της πρόσθετης μικροεφαρμογής S2Bot στον περιηγητή Google Chrome
Στη συνέχεια πρέπει να εγκαταστήσετε το πρόσθετο s2bot, στο chrome (αν δε το έχετε το chrome πρέπει να κατεβάσετε) . Και τα δύο, chrome και s2bot είναι δωρεάν.
Δυστυχώς το κατάφερα να δουλέψει μόνο στα Windows αλλά όχι σε Linux…
Στο linux: Δουλεύει με chromium στο MX linux (έκδοση 17 και μετά ) κατευθείαν, στο Mint μετά από ρυθμίσεις (δεν θυμάμαι πως το κατάφερα) και κάποιος συνάδελφος τα κατάφερε σε άλλη έκδοση (δείτε τα σχόλια στο τέλος και ιδιαίτερα του Φοίβου!).
- Ανοίχτε το Chrome και ψάξτε στη google για το s2bot (Εικ.1).
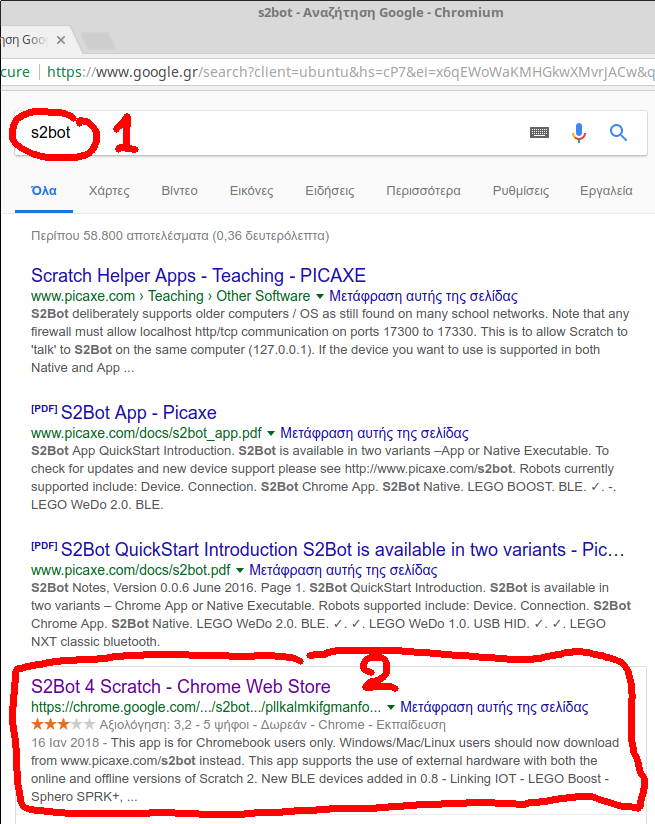
Εικόνα 1: βρίσκω το S2Bot στο Chrome Web Store
- Κάντε κλικ στο “S2Bot 4 Scratch – Chrome Web Store”
- Θα σας ανοίξει το παράθυρο της Εικ. 2. Κάντε κλικ στο κουμπί “+ ADD TO CHROME”
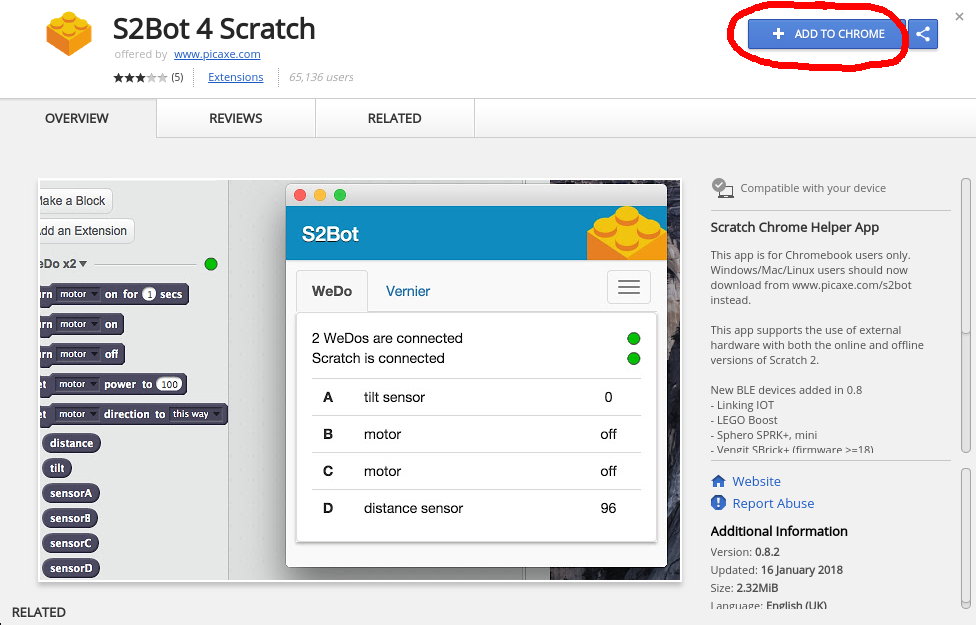
Εικόνα 2: S2Bot 4 Scrach
- Στην ειδοποίηση που θα βγεί (Εικ.3) κάντε κλικ στο “Add app”
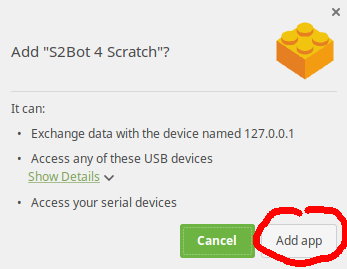
Εικόνα3: Add “S2Bot 4 Scratch”
- Στη συνέχεια θα σας ανοίξει μία καρτέλα του Chrome (Εικ.4) με τη νέα εφαρμογή S2Bot. Βλέπετε ότι η εφαρμογή S2Bot εγκαταστάθηκε.
Ας δημιουργήσουμε και συντόμευση στην επιφάνεια εργασίας για να ανοίγουμε το S2Bot χωρίς να χρειάζεται να ανοίγουμε το chrome.
Κάντε δεξί κλικ πάνω της και επιλέξτε “Create shortcuts…”, όπως φαίνεται στην Εικ. 4.
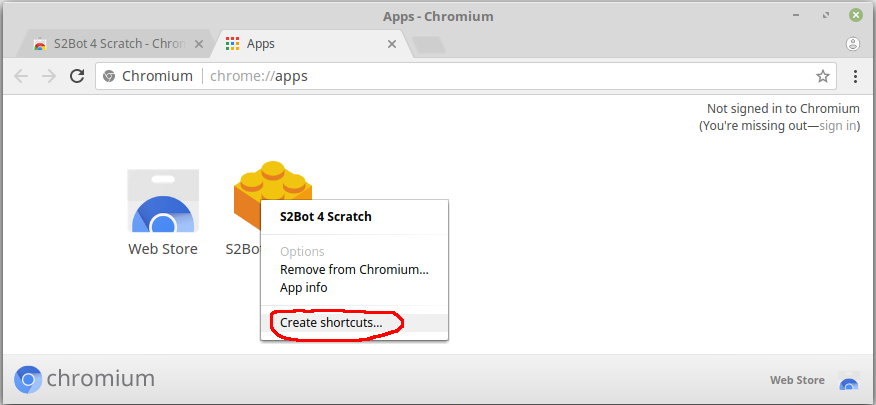
Εικόνα 4: Προσθήκη συντόμευσης
- Αφήστε τα επιλεγμένα κουτάκια όπως φαίνεται στην Εικ.5 και επιλέξτε “Create”.
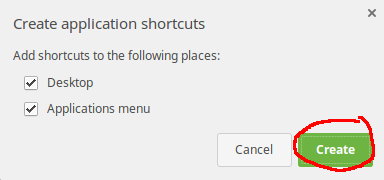
Εικόνα 5
 Πλέον θα εμφανιστεί το εικονίδιο S2Bot 4 Scratch στην επιφάνεια εργασίας σας.
Πλέον θα εμφανιστεί το εικονίδιο S2Bot 4 Scratch στην επιφάνεια εργασίας σας.
Δεν θα χρειαστεί να ανοίξετε το chrome για να συνδέσετε το lego WeDo hub 2.0.- Αρκεί να κάνετε διπλό κλικ στο εικονίδιο του S2Bot 4 Scratch στην επιφάνεια εργασίας.
Σύνδεση του του LEGO WeDo 2.0 hub με το Scratch.
- Συνδέστε τον αντάπτορα BLED 112 σε μία κενή θύρα usb του υπολογιστή σας.
- Ακολουθούν οι οδηγίες για τη σύνδεση του hub στον υπολογιστή και τη σύνδεση του scratch ώστε να ελέγχει το hub.
- κάντε διπλό κλικ στο εικονίδιο s2bot που βρίσκεται στην επιφάνεια εργασίας του υπολογιστή σας
- Στο παράθυρο που θα ανοίξει κάντε κλικ στο κουμπί “Scan for devices”
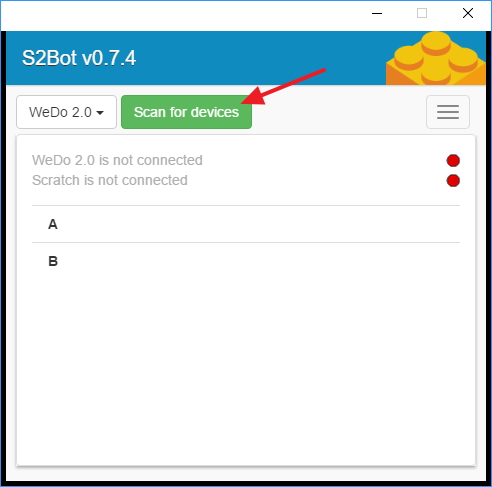
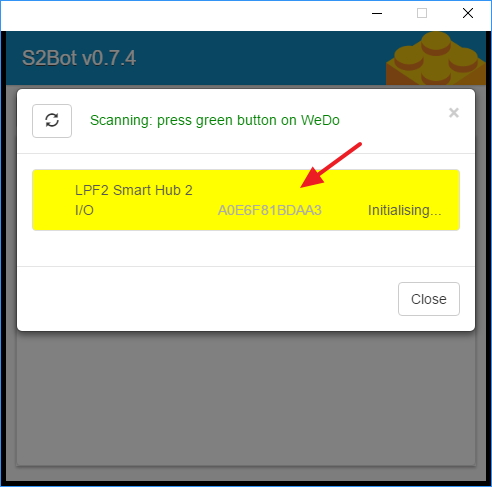
- Θα εμφανιστεί η ειδοποίηση για να ενεργοποιήσετε το lego wedo hub:
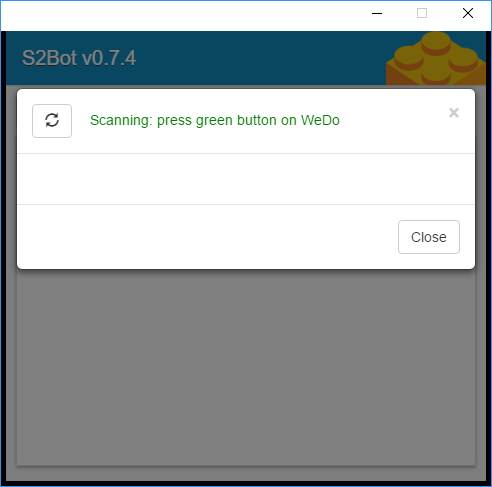
- Πατήστε το πράσινο κουμπί που βρίσκεται πάνω στο hub:
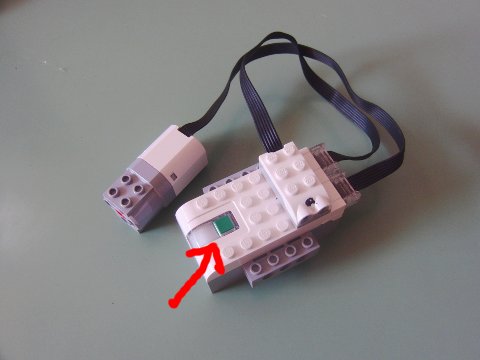
- Κάντε κλικ πάνω στο κίτρινο πλαίσιο στο οποίο εμφανίζεται το hub του ρομπότ σας:
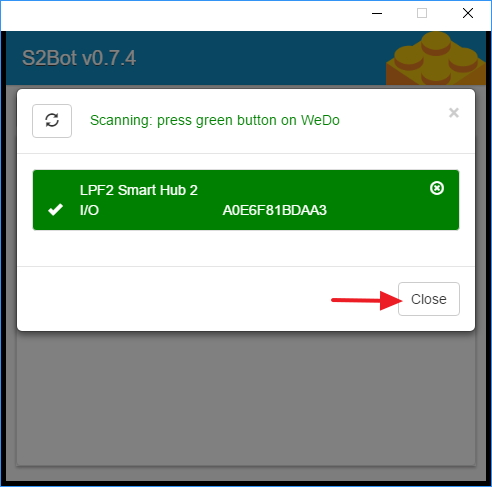
- Περιμένετε μέχρι να γίνει πράσινο και μετά κλείστε το παράθυρο πατώντας το κουμπί “Close”
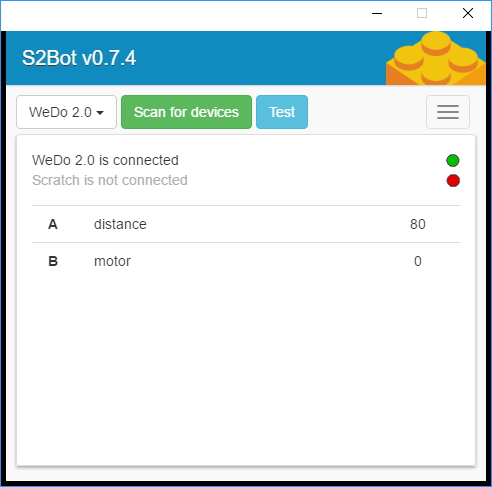
- Tο κουμπί πάνω στο hub έχει γίνει μπλε ενώ στο παράθυρο του s2bot αναφέρεται ότι ‘WeDo 2.0 is connected’, δηλαδή το WeDo hub έχει συνδεθεί με τον υπολογιστεί. Τώρα μένει να ανοίξουμε και το scratch.
-
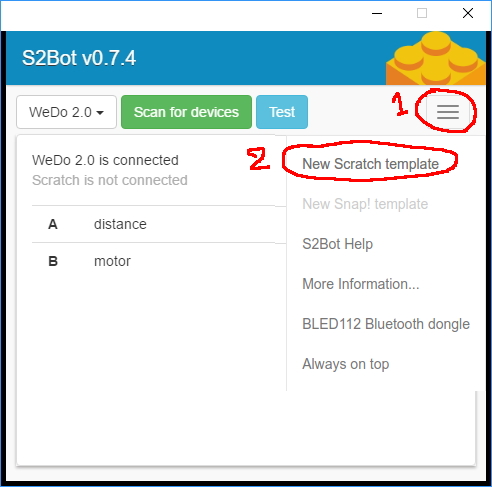
- Την 1η φορά πρέπει να αποθηκεύσουμε ένα template του Scratch το οποίο περιέχει οδηγίες για το τι αισθητήρες ή μοτέρ έχουμε συνδέσει στο hub. Αυτό θα γίνει μόνο μία φορά. Αν όμως αλλάξουμε τους αισθητήρες ή το μοτέρ (έστω και να τα αντιμεταθέσουμε) θα πρέπει να ξαναδημιουργήσουμε το template. Αυτό το template το δημιουργεί το S2Bot και ουσιαστικά είναι ένα άδειο αρχείο του scratch που όμως περιέχει πληροφορίες για το τί έχουμε συνδέσει στις δύο θύρες του hub.
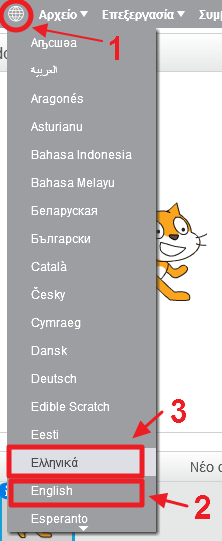
Όπως φαίνεται και στην παρακάτω εικόνα κάνουμε κλικ στις τρεις παύλες (1) και στη συνέχεια στη επιλογή “New Scratch template” (2). Αποθηκεύουμε το template στην επιφάνεια εργασίας με όνομα π.χ. ‘wedo2_template.sb2’.
- Κάντε διπλό κλικ πάνω στο εικονίδιο ‘wedo2_template.sb2’ που βρίσκεται στην επιφάνεια εργασίας του υπολογιστή σας, ώστε να ανοίξει το Scratch.

- Παρατηρήστε ότι στο παράθυρο του s2bot έχει γίνει πράσινη και η δεύτερη ένδειξη ‘Scratch is connected’, δηλαδή ότι το Scratch έχει και αυτό συνδεθεί με το hub μας!
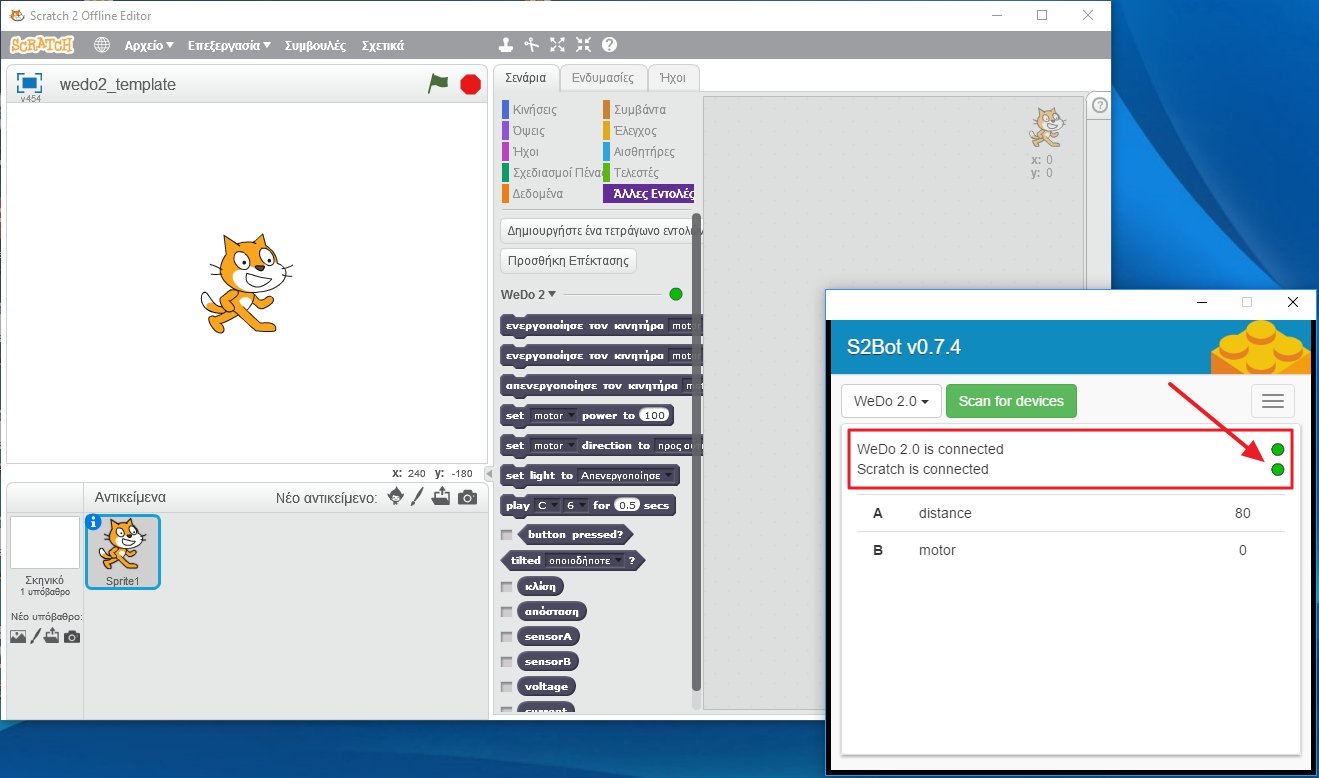
- Ώρα να προγραμματίσουμε το ρομπότ μας. Μην κλείσετε το παράθυρο s2bot. Μην ξεχάσετε να αποθηκεύσετε το πρόγραμμα στο Scratch όταν τελειώσετε!
Ένα πολύ ενδιαφέρον βίντεο του συνάδελφου Φωτεινάκη με αρκετές πληροφορίες για τη σωστή σύνδεση του s2bot και της σωστής χρήσης κινητήρων (με παρακολούθηση του ρεύματος και της τάσης του hub) μπορείτε να δείτε παρακάτω:
Στην ιστοσελίδα μου μπορείτε να βρείτε ένα σενάριο για την διδασκαλία ρομποτικής στην τάξη. Το δημιούργησα για μαθητές Ε’ και ΣΤ’ Δημοτικού. Συνολικά απαιτεί 6-8 διδακτικές ώρες. Ωστόσο προτείνω να γίνει σε 3-4 συνεχόμενα δίωρα.
Για να ξεκινήσετε με το 1ο μάθημα κάντε κλικ εδώ: Εισαγωγή στη Ρομποτική
Σημείωση: μπορείτε να βρείτε το μάθημα κατευθείαν και στο μενού της παρούσας ιστοσελίδας:
Μενού Προγραμματισμός > Ρομποτική (Scratch+WeDo) > 1. Εισαγωγή στη Ρομποτική
Δείτε τις κατασκευές με τις οποίες συμμετείχα με τους μαθητές μου στους διαγωνισμούς ρομποτικής και ορισμένα άρθρα που θα σας βοηθήσουν και θα σας δώσουν (ελπίζω) ιδέες για τις κατασκευές σας.
























Πηγές για κατασκευές και παραδείγματα:
- Οδηγίες κατασκευής από την επίσημη ιστοσελίδα LEGO: https://education.lego.com/en-us/lesi/support/product-support/wedo/wedo-base-set-9580/building-instructions
- http://www.wedobots.com/
- http://www.legoengineering.com/ , απίστευτη ιστοσελίδα παιδαγωγικού προσανατολισμού!
-
Για λόγους διαθεσιμότητας το pdf μπορείτε να το κατεβάσετε και από εδώ
Μια ιστοσελίδα για τον υπολογισμό ροπής – ταχύτητας περιστροφής ανάλογα με τα γρανάζια που επιλέγουμε!
Ορισμένες ιδέες, όπου η χρήση του wedo, εκτοξεύει τη διάδραση και το ενδιαφέρον των μικρών μαθητών για το Scratch:
Ρομποτικοί βραχίονες με Lego WeDo 2.0
Κατασκευές για προχωρημένους (αφορά το κιτ 9094, αλλά αποτελούν πηγή έμπνευσης και για το WeDo)
Επίσης κατασκευές lego μόνο για λίγους: http://jkbrickworks.com/
Ακόμη πιο προχωρημένες κατασκευές, όπου πλέον τα πράγματα ξεφεύγουν:
Το παρακάτω βίντεο επιδεικνύει το σετ “Lego Crazy Action Contraptions”. Τα περισσότερα κομμάτια υπάρχουν και μέσα στο κιτ του LEGO WeDo οπότε το βίντεο είναι πηγή πολλών ιδεών και ίσως επιλύσει (κατασκευαστικά) προβλήματα που ίσως έχετε συναντήσει:
Και ακόμη ένα κανάλι στο youtube με λίγα αλλά ενδιαφέροντα βίντεο για lego μηχανισμούς:
https://www.youtube.com/user/isogawamovie/videos
Για το τέλος μπορείτε να δείτε το κανάλι του ISOGAWA Yoshihito με τις απίθανες ιδέες του:
https://www.youtube.com/user/ISOGAWAYoshihito
Μια “ιδέα” για το τι έχει σκεφθεί με τα LEGO εδώ (θα βρείτε και κατασκευές με το LEGO WeDo):
http://www.isogawastudio.co.jp/legostudio/index.html
Και να κατεβάσετε το απίστευτο δωρεάν βιβλίο του “LEGO Technic Tora no Maki” , που είναι ότι καλύτερο είδα στο είδος του!!!!
http://www.isogawastudio.co.jp/legostudio/toranomaki/en/index.html
(σημ.: το κατέβασμα είναι δωρεάν και αν σας αρέσει του κάνετε μια συμβολική δωρεά)




12 comments
2 pings
Skip to comment form
Γεια σας
Είμαι συνάδελφος Πληροφορικός και ενδιαφερόμαστε να συμμετάσχουμε με τα παιδιά του σχολείου στον φετινό διαγωνισμό Ρομποτικής που έχει θέμα τον Εποικισμό του Άρη.Διάβασα τα μαθήματα που ανήρτησες στην ιστοσελίδα και τα βρήκα αρκετά ενδιαφέροντα.Σχεδιάζουμε και εμείς με τα παιδιά να κάνουμε μια κατασκευή σαν το curiosity και θα ήθελα αν θα μπορούσες να με βοηθούσες δίνοντάς μου το συνθηματικό που έχεις για την λύση του κώδικα scratch στην ιστοσελίδα http://users.sch.gr/nikmavr/?page_id=2584.Περιμένω νέα σου ευχαριστώ εκ των προτέρων
Στείλε μου στο προσωπικό μου βemail απλά έψαχνα να βρω το δικό σου για να επικοινωνήσω και δεν μπόρεσα.Ευχαριστώ και πάλι
Author
Γιώργο σου έστειλα τον κωδικό στο email σου. Ευχαριστώ για τα καλά σου λόγια και καλή επιτυχία στον διαγωνισμό!
Πολυ ενδιαφέρουσα σελίδα,
έχετε δει καθόλου το διαγωνισμό 2019 – Δημοτικό Ποδοσφαιράκι με 2 μοτερ wedo 2
υπάρχει κάποιο video που εχει wedo τετρατροχο με 2 μοτερ το οποίο στρίβει
Μια άλλη ιδέα είναι να το κάνεις 4χ2 και να βάλεις το ένα μοτερ για steering
Προτείνετε κάποιο Link σχετικό ???
Ηλίας
Author
Ηλία ευχαριστώ για τα καλά σου λόγια. Ένα βίντεο που βρήκα, για να πάρω και εγώ ιδέες για το ποδόσφαιρο είναι το παρακάτω. Κοίτα στο 4′ 42″ όπου έχει αγώνα ποδοσφαίρου από πέρσι που έγινε πιλοτικά:
Τελικός Πανελλήνιου Διαγωνισμού Εκπαιδευτικής Ρομποτικής 2018
Γεια χαρά και συγχαρητήρια για τη δουλειά σου. Σου γράφω περίπου ένα χρόνο μετά από την τελευταία ανανέωση του άρθρου: το S2bot app, με τη διαδικασία που περιγράφεις, ως επέκταση του Chromium, μου δούλεψε κανονικά σε Linux.
Author
Αγαπητέ Φοίβο,
ευχαριστώ για το σχόλιό σου. Θα ενημερώσω το άρθρο για τη λειτουργία του s2bot στο Linux.
Η αλήθεια είναι ότι κατάφερα να παίξει το s2bot στο MX 17 linux με την 1η χωρίς να ρυθμίσω τίποτε από πέρσι. Με ένα παλιό acer netbook συμμετείχαμε στον περσινό διαγωνισμό με MX17 (το οποίο έτρεχε από usb flash σε persistence mode), s2bot και φυσικά Scratch 2.0.
Μετά τον διαγωνισμό κατάφερα να το κάνω να παίξει και στον σταθερό μου που είχε linux Mint 18.03 αλλά μετά από πολλές δοκιμές και χωρίς να μου είναι ξεκάθαρο πως το έκανα (υποθέτω ότι άνοιξα κάποιο/α ports αλλά δεν είμαι σίγουρος…).
Σήμερα, μετά το σχόλιό σου, δοκίμασα το s2bot με το BLED στο σχολικό εργαστήριο με Ubuntu LTSP 18.04 και δεν το κατάφερα να δουλέψει ούτε στον server ούτε σε clients.
Μπορείς να μου πεις σε τι έκδοση σου δούλεψε για να το προσθέσω στο άρθρο;
Σε ευχαριστώ ακόμη μια φορά για τον χρόνο σου και το σχόλιό σου.
Linux Mint 18.2 Sonya, σε παλιό λάπτοπ Acer, κατά σύμπτωση, κι εγώ.
Scratch 2.0 v.461 και S2Bot 4 Scratch
Για την εγκατάσταση του Scratch, και πριν απ’αυτό του Air, χρησιμοποίησα αυτά (δυστυχώς δεν θυμάμαι πώς ακριβώς ):
https://askubuntu.com/questions/1042608/how-to-install-scratch-2-in-ubuntu-18-04
https://forums.linuxmint.com/viewtopic.php?t=200573
Το S2Bot app κατάφερα να το ανοίξω μόνο όταν το εγκατέστησα, σύμφωνα με τις οδηγίες σου, ως extension του Chromium, και ΟΧΙ όταν το κατέβασα από το σάιτ της Picaxe (http://www.picaxe.com/Teaching/Other-Software/Scratch-Helper-Apps/)- από εκεί μου δούλεψε μόνο το native version, το οποίο όμως δεν προβλέπει σύνδεση δύο ή παραπάνω hub ταυτόχρονα.
Αν θυμάμαι καλά χρειάστηκε να ανοίξω και κάποια ports, σύμφωνα με τις οδηγίες εδώ: http://www.picaxe.com/docs/s2bot_app.pdf, σελ. 2
Αυτά, ελπίζω να βοήθησα
Author
Φοίβο, ευχαριστώ για τον χρόνο σου και τις πληροφορίες!
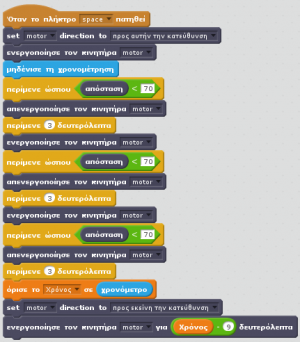
Γεια σας. Είμαι συνάδελφος πληροφορικής και ασχολούμαι για πρώτη φορά με την ρομποτική και λόγω δυο μικρών παιδιών εχω περιορισμένο χρόνο. Επειδή βλέπω οτι έχετε εμπειρία Θα ήθελα αν μπορούσατε να με βοηθήσετε λίγο . Χρησιμοποιώ scratch 2 και wedo 2 ψαχνω στα sensor block να βρω το block to value sensor γιατι έχω δει σε κάποιους κώδικες ότι το χρησιμοποιούν και δεν το βρίσκω .Βασικά θέλω να προγραμματίσω μια πόρτα να ανοίγει όταν βλέπει κίνηση και να κλείνει όταν δεν υπάρχει κίνηση(το έχω πετύχει κατα το ήμισυ :)) και θέλω να ορίσω μια μεταβλητή να παίρνει την τιμή distance to value sensor. Ευχαριστώ εκ των προτέρων..
Author
Καλημέρα Ειρήνη,
και καλώς ήρθες στον κόσμο της ρομποτικής! Κάθε αρχή και δύσκολη αλλά και αυτό έχει την ομορφιά του όταν τελικά βρίσκεις τις λύσεις…
Την ίδια απορία είχα και εγώ όταν χρησιμοποίησα τον αισθητήρα απόστασης. Η λύση είναι απλή και για το πρόβλημα φταίει το scratch 2.
Δεν θα χρησιμοποιήσεις τη μεταβλητή “απόσταση”, αλλά αναλόγως που έχεις βάλει τον αισθητήρα απόστασης, θα χρησιμοποιήσεις τη μεταβλητή “sensor A” ή “sensor B”. Αν δηλαδή έχεις βάλει στο hub τον κινητήρα στην θύρα Α και τον αισθητήρα απόστασης στη θύρα Β (το hub έχει δύο θύρες για να συνδέσουμε κινητήρες ή αισθητήρες) τότε αντί για το “απόσταση” πρέπει να χρησιμοποιήσεις το “Sensor B”.
Για να δεις αν είναι στη θύρα Α ή Β αρκεί να συνδέσεις hub-s2bot-scratch να τσεκάρεις στο Scratch τις μεταβλητές “Sensor A” και “Sensor B” ώστε να εμφανίζονται στην οθόνη του Scratch (στην κατηγορία εντολών “Άλλες εντολές”). Στη συνέχεια πλησίασε το χέρι σου στον αισθητήρα απόστασης και κοίτα στην οθόνη του Scratch αν αλλάζει η τιμή του Sensor A” ή του “Sensor B” για να δεις ποια πρέπει να χρησιμοποιήσεις.
Ευχαριστώ πολύ για την βοήθεια!
[…] το βοηθητικό πρόγραμμα S2botApp for Scratch. Υπάρχει μια πολύ αναλυτική παρουσίαση από συνάδερφο εκπαιδευτικό με τα βήματα που […]
[…] το βοηθητικό πρόγραμμα S2botApp for Scratch. Υπάρχει μια πολύ αναλυτική παρουσίαση από συνάδερφο εκπαιδευτικό με τα βήματα που […]